Exercice 4 ⭐️⭐️⭐️ Barre suspendue par des ressorts, Spé/L2
D’après oral X MP.
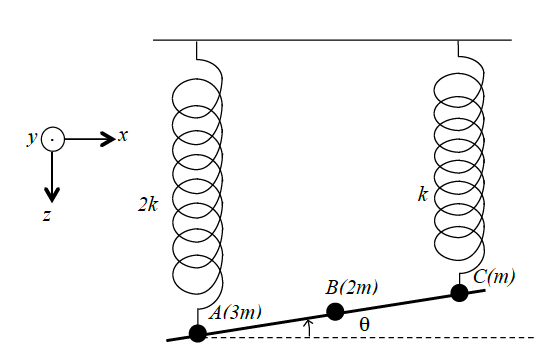
Sur une barre métallique, de longueur 2L et de masse négligeable, sont fixées, aux extrémités et au milieu, de gauche à droite, des masses 3m (point A), 2m (point B) et m (point C). Les extrémités de la barre sont suspendues au plafond par des ressorts de raideur 2k à gauche et k à droite, de masses négligeables, de longueurs au repos identiques. L’axe vertical descendant est (Oz), l’origine étant prise à l’extrémité des ressorts avant qu’on fixe les masses à la barre. Dans la suite, on considère que les mouvements des trois points A,B,C sont quasiment verticaux.
Faire le bilan des actions exercées sur la barre. Préciser la position du centre d’inertie G, et déterminer les positions d’équilibre des 3 masses.
On s’intéresse aux petits mouvements de la barre ; déterminer les équations vérifiées par la position zG du centre d’inertie, et par l’angle θ que fait la barre avec l’axe horizontal.
Corrigé
En référentiel terrestre supposé galiléen, le systèmeétudié est formé de la barre et des trois masses.
• Les actions exercées sont :
les tensions des deux ressorts : FA=−2kzAuz;FC=−kzCuz
les trois poids.
• Position de G : AG=6m2mAB+mAC, d’où AG=32L. Alors GB=3L et GC=34L.
• À l’équilibre, la somme des forces extérieures est nulle. D’où 6mg=k(2zA+zC).La somme des moments des forces extérieures, calculée par rapport à l’axe (Gy) est nulle (G point fixe à l’équilibre):
32L(−2kzA)cosθ+34LkzCcosθ=0.zA=zC=k2mg.
Par conséquent zB=2mg/k également.
Il y a deux degrés de liberté zG et θ ; zA=zG+32LsinθetzC=zG−34Lsinθ.
Avec le théorème du centre de masse projeté sur (Oz) et dans l’approximation des petits angles :
Pour appliquer le théorème du moment cinétique, plaçons-nous dans le référentiel barycentrique R∗, référentiel en translation par rapport au référentiel du laboratoire et dans lequel G est fixe. Dans R∗, la barre a un mouvement de rotation autour de (Gy) et on applique le théorème du moment cinétique scalaire rapport à l’axe (Gy).
Dans R∗, aux actions exercées précédentes s’ajoutent les forces d’inertie −miaG)⌋R.
Le moment du poids total, s’appliquant en G, est nul. Le moment par rapport à G des forces d’inertie d’entraînement MG,fie=(mGA+2mGB+3mGC)∧(−aG)⌋R)=0∧(−aG)⌋R)=0.
Les deux équations obtenues correspondent à des oscillations sinusoïdales de zG et θ autour des valeurs zGeˊq=k2mg et θeˊq=0.
Exercice 12 ⭐️⭐️ Modes propres, Spé/L2
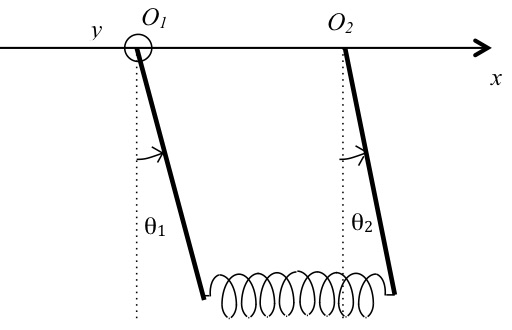
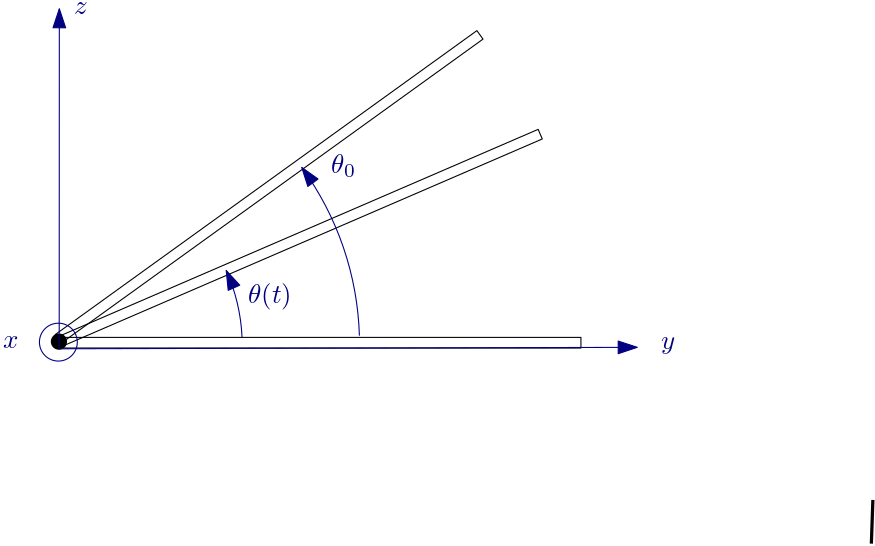
Deux pendules sont constitués de deux tiges homogènes de masses m1 et m2, de même longueur ℓ, dont les points d’attache, fixes, sont sur l’axe (Ox) horizontal et distants de a0. On étudie les mouvements des pendules, en l’absence de frottement, dans le plan vertical (xOz). Les extrémités mobiles des pendules sont reliées par un ressort de longueur à vide a0, de raideur k, de masse négligeable. On donne le moment d’inertie d’une barre homogène par rapport à un axe passant par son extrémité et perpendiculaire à la barre J=m3ℓ2.
Etudier les équations du mouvement pour les petits mouvements des pendules θ1(t) et θ2(t).
Est-il possible qu’il existe des modes propres (mouvements oscillants sinusoïdaux de même pulsation pour les deux pendules) ? Etudier le cas m1=m2, et montrer que la solution générale du mouvement est la superposition des mouvements correspondant aux modes propres.
Corrigé
En référentiel terrestre supposé galiléen, les actions exercées sur la barre 1 sont :
Poids
Actions d’axe de moment nul parr apport à l’axe de rotation (pas de frottement)
Tension du ressort : F1=kℓ(sinθ2−sinθ1)ux.
Le théorème du moment cinétique scalaire appliqué à la barre 1 par rapport à l’axe fixe parallèle à (y) passant par O1 donne :
On cherche des solutions oscillantes de pulsation ω, avec θ2¨=−ω2θ2 et θ1¨=−ω2θ1.
{(ω2−ω02−ω22)θ2+ω22θ1=0ω12θ2+(ω2−ω02−ω12)θ1=0. D’où pour qu’il y ait des solutions non identiquement nulles
∣∣∣∣∣ω2−ω02−ω22ω12ω22ω2−ω02−ω12∣∣∣∣∣=0
Cas ω2=ω1
ω2−ω02−ω12=±ω12 , soit ω2=ω02 ou ω2=ω02+2ω12.
Pour ω=ω0,θ1=θ2, les deux pendules oscillent en phase, la distance entre les deux extrémités restant égale à ℓ0.
Pour ω2=ω02+2ω12,θ1=−θ2, les deux pendules oscillent en opposition de phase.
En faisant la somme et la différence des équations du système (1), la somme s et la différence d des angles obéissent aux équations
{s¨+ω02s=0d¨+(ω02+2ω12)d=0 et avec {θ1=21(s+d)θ2=21(s−d), le résultat est démontré.
Exercice 27 ⭐️⭐️ Mouvement avec frottement, Spé/L2
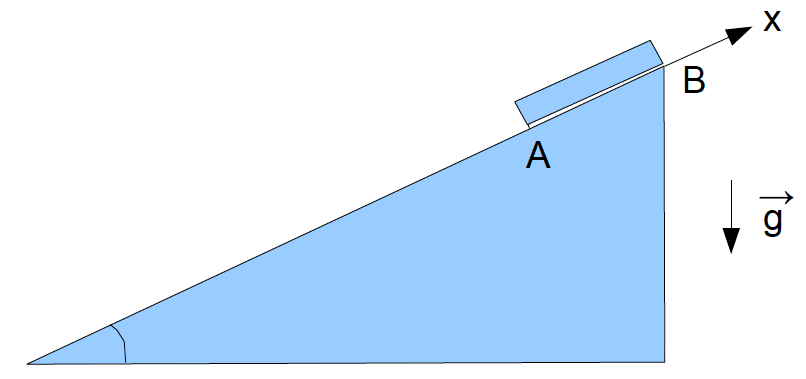
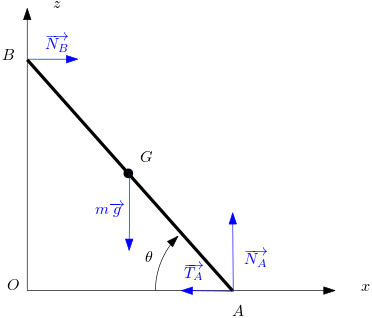
Un tronc d’arbre assimilable à une tige homogène de longueur L=20 m, de masse m=2000 kg repose sur une ligne de plus grande pente du flanc d’une falaise, le flanc faisant un angle α=30° avec le plan horizontal. On prend f=fs=fd=0,5. Le tronc est en contact avec le plan en deux points :
son extrémité A, où se trouve initialement une cale
B, sommet de la falaise où se trouve initialement l’autre extrémité du tronc.
Le frottement en B est négligeable. Le frottement en A obéit aux lois de Coulomb.
On négligera le diamètre de l’arbre.
Quelle distance doit parcourir l’arbre avant de basculer (sans calcul) ?
Quelle est la condition sur f pour qu’il y ait équilibre quand on enlève la cale ?
On déclenche une explosion en A, ce qui communique une vitesse V0=V0ux au tronc (vers le sommet de la falaise). Sachant qu’un kg de charge libère ε=300 kJ, quelle est la charge minimale (en kg) nécessaire pour faire basculer l’arbre ?
Réflexe
Mouvement de translation du solide selon (Bx) 👉 Le moment cinétique scalaire selon (By) est conservé (il est d’ailleurs nul).
Corrigé
On suppose le référentiel terrestre galiléen.
Le moment du poids peut faire basculer le tronc lorsque son centre d’inertie G dépasse le sommet de la falaise, soit une distance parcourue de L/2.
Le tronc est soumis à son poids, à la réaction en A : RA=TAux+NAuy, à la réaction en B : NB=NBuy.
L’équilibre impose :
la somme des forces est nulle : {TA−mgsinα=0NA+NB−mgcosα=0
le moment des forces par rapport à (By) est nul : NAL−mg2Lcosα=0.
Avec les lois de Coulomb pour le contact entre solides, la condition d’équilibre TA≤fNA donne f≥2tanα.
L’explosion communique une énergie cinétique initiale Ec0. On cherche si G peut atteindre le sommet. L’abscisse de G est x(t) avec x(0)=0.
Le tronc est soumis aux forces du 1) avec cette fois TA=fNA puisqu’il y a glissement.
Tant qu’il y a translation (pas de rotation du solide), le théorème du moment cinétique scalaire par rapport à (By) donne NA(L−x)−mg(2L−x)cosα=0.
Attention, cette fois, la force de frottement s’oppose au mouvement de l’arbre et est orientée selon −ux.
D’où TA=−fmgL−x2L−xcosα.
Seuls TA et le poids travaillent. Lorsque G atteint le sommet, le théorème de l’énergie cinétique impose : 21mv2−Ec0=−∫x=0L/2[fmgL−x2L−xcosα+mgsinα]dx.
C’est possible pour 21mv2=Ec0−mg[fcosα∫x=0L/2L−x2L−xdx+(L/2)sinα]≥0. ∫x=0L/2L−x2L−xdx=∫x=0L/2(1−L−x2L)dx=2L(1−ln2).
En considérant que l’énergie libérée par l’explosion d’une masse M est intégralement transmise au tronc sous forme d’énergie cinétique (hypothèse très grossière), la masse minimale est (homogène) : M≥m2εgL[f(1−ln2)cosα+sinα].
A.N. : M=0,6 kg.
Exercice 37 ⭐️⭐️ Système masses-poulie, Spé/L2
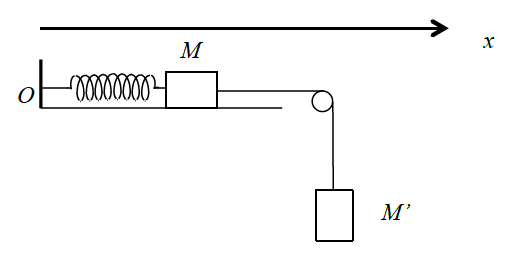
Un objet, assimilable à un point matériel M, de masse m, glisse sans frottement sur le plan horizontal. Il est relié au point fixe O par un ressort horizontal de raideur k, de longueur au repos ℓ0. Le point matériel M′ , de masse m′, est animé d’un mouvement rectiligne vertical. Le fil, de masse négligeable, est inextensible et glisse sans frottement sur la poulie, qui elle-même est mobile sans frottement autour de son axe.
Trouver la position d’équilibre de M.
La poulie est de masse négligeable. Exprimer la période des oscillations du système.
La masse μ de la poulie de rayon R n’est plus négligeable. Son moment d’inertie par rapport à son axe de rotation est J=2μR2. Déterminer la période des oscillations.
On s’intéresse à nouveau à l’équilibre de M en tenant compte du coefficient de frottement statique fs entre le mobile et la table. Qu’y a-t-il de modifié ?
Corrigé
:::1. Le référentiel terrestre est supposé galiléen. M est soumis à son poids , à la réaction verticale du support, à la tension du fil F=Fux et à la tension du ressort T=−k(x−ℓ0)ux.
M’ est soumis à la tension du fil F′=−F′uz et à son poids.
À l’équilibre, en l’absence de frottement du fil sur la poulie F=F′. Le principe fondamental de la dynamique appliqué aux deux masses donne (avec l’axe (Oz) vertical descendant) :
mx¨=−k(x−ℓ0)+F=0.
m′z¨=m′g−F=0. D’où x=xeˊq=ℓ0+km′g.
Le fil est inextensible : z˙=x˙. C’est un problème à un seul degré de liberté (voir remarque à la fin). (m+m′)x¨=m′g−k(x−ℓ0) , soit avec u=x−xeˊq,
(m+m′)u¨=−ku, d’où la période (homogène) τ=2πkm+m′.
Les deux tensions du fil de part et d’autre de la poulie ne sont plus égales.
mx¨=−k(x−ℓ0)+F
m′z¨=m′g−F′
La poulie est soumises aux tensions des fils opposées aux précédentes, le fil étant sans masse, aux actions d’axe dont le moment par rapport à l’axe de rotation est nul (pas de frottement), et à son poids dont le moment par rapport à l’axe est nul, le centre d’inertie étant sur l’axe. On applique le théorème du moment cinétique à la poulie, en projection par rapport à son axe :
Jθ¨=R(F′−F)
Pas de glissement du fil sur la poulie, donc x˙=z˙=Rθ˙
D’où en sommant : (m+m′+μ/2)u¨=−ku, soit
T′=2πkm+m′+μ/2
M est soumis à son poids, à la réaction verticale du support RN et à la réaction tangentielle RT, à la tension du fil F=Fux et à la tension du ressort T=−k(x−ℓ0)ux.
M′ est soumis à la tension du fil F′=−F′uz et à son poids.
À l’équilibre, en l’absence de frottement du fil sur la poulie F=F′. Le pfd appliqué aux deux masses donne :
−k(x−ℓ0)+F+RT=0
RN=mg
m′g−F=0
D’où RT=k(x−ℓ0)−m′g. L’équilibre nécessite ∣RT∣≤fsRN, soit ∣k(x−ℓ0)−m′g∣≤fsmg
Pour k(x−ℓ0)−m′g>0,k(x−ℓ0)−m′g<fsmg⟹ℓ0+kgm′≤x≤ℓ0+kg(m′+fsm).
Pour k(x−ℓ0)−m′g<0,−k(x−ℓ0)+m′g<fsmg⟹ℓ0+kg(m′−fsm)≤x≤ℓ0+kgm′
Finalement, il y a une plage de valeurs possibles pour l’équilibre : ℓ0+kg(m′−fsm)≤x≤ℓ0+kg(m′+fsm) Remarque — x˙=z˙=Rθ˙, il s’agit d’un problème à un degré de liberté 👉approche énergétique.
De fait les questions 2 et 3 se résolvent (plus) facilement avec une approche énergétique en dérivant par rapport au temps l’énergie mécanique du système masses+poulie+fil : Em=21(m+m′)x˙2+21k(x−ℓ0)2+m′gx+Cte pour 2), Em=21(m+m′+μ/2)x˙2+21k(x−ℓ0)2+m′gx+Cte′ pour 3).
Mais la question 4 nécessite de revenir à une analyse plus détaillée des forces.
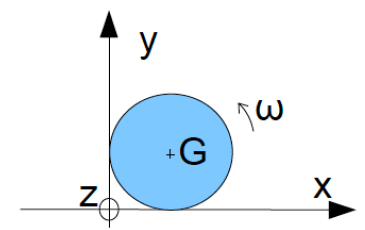
Exercice 60 ⭐️⭐️ Boule contre un mur, Spé
Une boule homogène de masse m, de rayon a, de centre d’inertie G, de moment d’inertie J par rapport à l’un de ses diamètres, est en contact avec le sol et avec un mur. Elle tourne autour de l’axe horizontal (Gz) à vitesse angulaire ω(t), le coefficient de frottement entre la boule et les deux supports fixes étant f.
Déterminer les réactions R et R′ du sol et du mur.
La vitesse angulaire initiale est ω0>0. Déterminer ω(t).
Retrouver ce résultat par un raisonnement énergétique.
Corrigé
Le référentiel terrestre est supposé galiléen. R=Rnuy+Rtux. Rn>0, et comme il y a glissement Rt=−fRn, la réaction tangentielle est opposée à la vitesse de glissement. R′=Rn′ux+Rt′uy. De même, Rn′>0 et Rt′=fRn′ opposée à la vitesse de glissement G est immobile. La somme des forces exercées sur la boule est donc nulle. {−fRn+Rn′=0−mg+Rn+fRn′=0
d’où {Rn=1+f2mgRn′=1+f2fmg.
En appliquant le théorème du moment cinétique en projection sur (Gz) Jω˙=a(Rt−Rt′)=−a(1+f2fmg+1+f2f2mg)=−a1+f2fmg(1+f)
D’où ω(t)=ω0−Ja1+f2fmg(1+f)t.
La boule s’arrête de tourner pour t=fmga(1+f)Jω0(1+f2), homogène.
Par application du théorème de la puissance cinétique dtd(21Jω2)=ωa(Rt−Rt′) ce qui redonne le même résultat.
Exercice 120 ⭐️⭐️⭐️ Mouvement d’une corde, L2
D’après Mines.
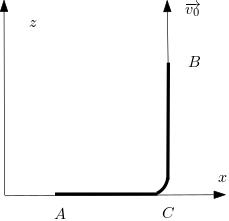
Une corde homogène AB est posée le long de l’axe (Ox) sur une table horizontale. On soulève l’extrémité B avec une vitesse verticale constante v0, la corde se déplaçant dans le plan vertical (xOz), avec (Oz) axe escendant. À la date t, l’ordonnée de B est donc z=v0t(v0=∥∥∥∥v0∥∥∥∥).
Tous les points de la corde en contact avec la table sont considérés au repos, et on suppose que la corde est coudée en angle droit au point C de la corde situé sur la table, à l’aplomb du point B (la courbure en C est négligée).
Montrer que, tant que la corde touche la table, l’ordonnée de son centre de masse G est Z(G)=2Lz2 .
En déduire l’expression de la composante verticale de l’accélération de G en fonction de v0 et L.
Lorque la corde est entièrement verticale en contact avec la table (nouvel instant initial), on abaisse le point B avec une vitesse constante −v0 jusqu’à ce que la corde se retrouve sur la table. Quelle est l’expression de l’accélération verticale du centre d’inertie de la corde ? On ne se préoccupe pas de la manière dont la corde s’étale sur la table. Commenter.
On appelle poids apparent Pa la force dont le module est indiqué par une balance.
a. Justifier que dans un cas statique, le poids apparent est égal au poids de l’objet posé sur la balance.
b. La corde est verticale, en contact avec le plateau d’une balance électronique au point A. Le rôle de la table des questions 1. et 2. est maintenant joué par le plateau de la balance. On lâche la corde avec une vitesse initiale nulle à t=0. On admet que l’accélération de l’extrémité B est g=−gez et on suppose que les points de la corde ont une vitesse nulle dès qu’ils touchent le plateau.
Exprimer l’accélération du centre d’inertie de la corde et commenter son expression. On introduira τ=g2L.
c. En utilisant le théorème du centre de masse, montrer que le poids apparent indiqué par la balance est Pa=3m(t)g où m(t) est égal à la masse de la corde sur le plateau de la balance. À quel date le poids apparent de la corde est-il égal à son poids total ?
Indice
Attention, le centre de masse de la corde n’est pas nécessairement situé au milieu de la corde. C’est un système déformable, il faut revenir à la définition du centre de masse en fonction de la masse linéique μ, de sa masse totale mT ; P étant un point courant de la corde : OG=mT1∫ABμOPdℓ.
Corrigé
Par définition, en notant μ la masse linéique de la corde, mT sa masse et z′(M) l’altitude d’un point quelconque de la corde, Z(G)=mT1∫ABμz′(M)dz′=mT1∫0zμz′(M)dz′=mTμ2z2=2Lz2.
La vitesse verticale V(G)=2L2z˙zuz=Lv02tuz et l’accélération verticale a(G)=Lv02uz.
De même Z(G)=2Lz2, V(G)=2L2z˙zuz=L−v0(L−v0t))uz et a(G2)=Lv02uz.
Dans le premier cas, G monte avec une vitesse qui augmente car la longueur de corde animée d’une vitesse verticale augmente, dans le second cas, symétriquement, G descend avec une vitesse qui diminue.
a. L’indication donnée par la balance est (à g près) la valeur de la force exercée sur le plateau par un dispositif interne à la balance, qui équilibre la force exercée sur le plateau par ce qui est posé sur la balance (par exemple la force d’un dynamomètre, notée ici −Pa). Le théorème du centre de masse appliqué au plateau de la balance équilibrée donne : Fobjet→balance−Pa=0.
Le théorème du centre de masse appliquée à un objet au repos, de masse mT posé sur le plateau s’écrit mTg+Fbalance→objet=0,
donc d’après la loi des actions réciproques Pa=mTg.
Dans le cas statique, le poids apparent est le poids réel.
b. Le mouvement de B est uniformément accéléré . Comme dans les
questions 1) et 2), l’altitude du centre d’inertie est Z(G)=2Lz2
où z=z(B)=L−21gt2.
D’où V(G)=2L2z˙zuz=(L−21gt2)(−gt)/Luz
et a(G)=−g(1−2L3gt2)uz=−g(1−τ23t2)uz.
Au début de la chute, l’accélération est −guz.
Puis son module diminue car la longueur verticale de la corde diminue.
La longueur verticale diminuant de plus en plus vite, la vitesse de G reste selon −uz, mais son accélération s’annule
pour t=t0=3τ, puis est portée par +uz
jusqu’à ce que B touche le plateau.
c. Dans le référentiel du laboratoire supposé galiléen, le théorème du centre de masse appliqué à la corde donne mTa(G)=mTg+Fbalance→corde.
Donc Fbalance→corde=mT[−g(1−τ23t2)+g]uz=mTgτ23t2uz.
Or la masse de la corde sur la balance est m(t)=μ(L−z(t))=μ21gt2=mTτ2t2.
On obtient bien Fbalance→corde=−Papp=3m(t)g.
La balance indique le poids de la corde lorsque l’accélération de la corde est nulle, soit pour soit pour t=t0=3τ. Remarque— On a alors m(t)=3mT=mT.
Exercice 123 ⭐️⭐️ Positions d’équilibre d’un solide, Sup/L1
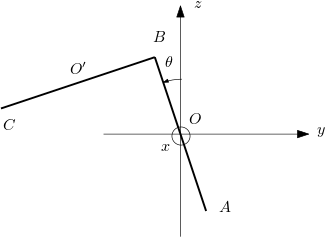
On étudie en référentiel terrestre galiléen un système composé de deux barres homogènes identiques, de même masse M, de longueur 2b, maintenues perpendiculaires et rigidement liées en leur point commun B. Le système est mobile sans frottement autour de l’axe (Ox), le point fixe O étant le milieu de (AB).
Le moment d’inertie de l’ensemble par rapport à l’axe (Ox) est J=38Mb2.
Combien de degrés de liberté possède le système? Exprimer l’énergie cinétique de l’ensemble.
Trouver une constante du mouvement et discuter la stabilité des
positions d’équilibre.
Etudier les petits mouvements du système autour de sa position
d’équilibre stable.
Réflexe
Un seul degré de liberté 👉 Une équation scalaire suffit.
Positions d’équilibre et stabilité pour un système conservatif 👉 les positions d’équilbre correspondent aux extrema de l’énergie potentielle (maximum pour une position instable, minimum pour une position d’équilibre stable)
Corrigé
Le seul degré de liberté est l’angle θ. Il s’agit d’un solide en rotation autour d’un axe fixe Ec=21Jθ˙2. Il suffit d’une équation scalaire pour étudier le mouvement.
Le solide est soumis
-aux actions de contact en O, dont le travail est nul (pas de frottement)
-au poids, qui dérive d’une énergie potentielle Ep(θ).
L’énergie mécanique Em=Ec+Ep est donc une constante du mouvement.
L’énergie potentielle de pesanteur est la somme des énergies potentielles de chaque barre. La barre AB a pour centre d’inertie le point O, dont l’altitude ne varie pas, son énergie potentielle est constante. La barre BC a pour centre d’inertie O′ d’altitude zO′. OB=b(cosθez−sinθey), et O′B=b(cosθey+sinθez)
Avec OO′=OB+BO′, zO′=b[cosθ−sinθ] et Ep(θ)=MgzO′=Mgb[cosθ−sinθ].
Les positions d’équilibre correspondent aux extrema de Ep(θ). Ep′(θ)=−Mgb[sinθ+cosθ]
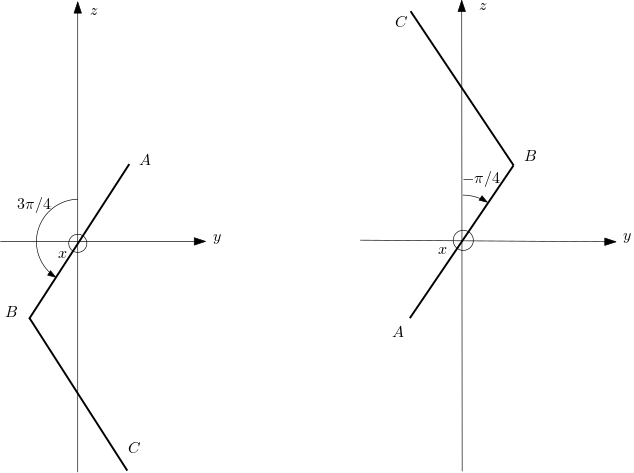
Pour −π≤θ≤π, Ep′(θ)=0⟺θ=−π/4 ou θ=3π/4…
Dans les deux cas O et O′ sont sur la même verticale.
La stabilité est donnée par le signe de E"p(θ)=−Mgb[cosθ−sinθ].
En θ=3π/4, l’équilibre est stable car E"p(3π/4)>0.
En revanche, en θ=−π/4 l’équilibre est instable car E"p(−π/4)<0.
dtdEm=0⇒θ˙(Jθ¨−Mgb[sinθ+cosθ])=0.
Au voisinage de 3π/4, posons θ=3π/4+u. Pour Jθ˙=0, on obtient Ju¨−Mgb[sin(3π/4+u)+cos(3π/4+u)]=0.
En se limitant aux termes d’ordre 1 en u, Ju¨−Mgb[22−u22+(−22−u22)]=0 ⟺Ju¨+2Mgbu=0.
C’est l’équation d’un oscillateur harmonique de pulsation ω=JMgb2,ω=8b32g. L’évolution de l’angle autour de sa position d’équilibre stable est de la forme θ(t)=3π/4+Acos(ωt+φ).
Exercice 125 ⭐️⭐️⭐️ Position d’équilibre d’un système, X MP 2021, Spé hors PSI/L2
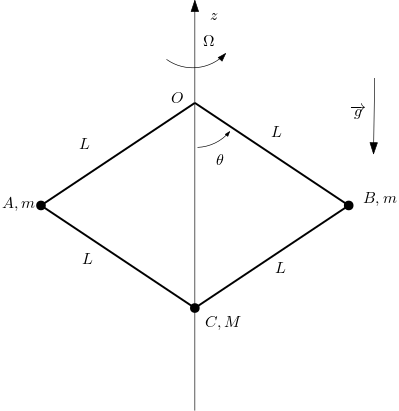
Un système en rotation à la vitesse angulaire Ω autour d’un axe vertical (Oz) est composé de trois masses mobiles situées en A,B, et C de masses respectives m, m, et M, liées entre elles et au point fixe O par des tiges rigides de masse négligeable, de longueur identique L. Le point C est astreint à coulisser sans frottement sur l’axe (Oz). L’ensemble des masses et des tiges reste dans un plan, et les liaisons mécaniques du système sont des liaisons rotule sans frottement. Déterminer les positions θe d’équilibre du système.
Réflexe
Problème à un degré de liberté θ 👉 Possibilité de se limiter à une approche énergétique (ou au théorème du moment cinétique scalaire, moins commode ici).
Corrigé
Attention ici Ω=θ˙.
Il s’agit d’un équilibre dans le référentiel tournant à la vitesse angulaire Ω autour de (Oz), ce qui correspond dans le référentiel terrestre galiléen à une trajectoire circulaire uniforme de A et B à la vitesse angulaire Ω autour de l’axe (Oz), de rayon Lsinθ.
Qualitativement, quand la vitesse angulaire augmente, on s’attend à une augmentation de θ jusqu’à la valeur limite π/2.
Étudions l’équilibre du système dans le référentiel tournant non galiléen. A et B sont soumis à
leur poids
les actions de liaison
la force d’inertie d’entraînement centrifuge fie=mΩ2rur=mΩ2Lsinθur, avec ur le vecteur unitaire radial (vecteurs opposés pour A et B) .
Les actions de contact sans frottement ont une puissance nulle. Le poids dérive de l’énergie potentielle Ep1=−mgLcosθ, et la force d’inertie dérive de Ep2=−21mΩ2r2=−21mΩ2L2sin2θ, à une constante près.
Le point C est soumis à son poids qui dérive de l’énergie potentielle Ep3=−Mg2Lcosθ, et aux actions de liaison de puissance nulle.
L’énergie potentielle totale du système est Ep=2(Ep1+Ep2)+Ep3=−mΩ2L2sin2θ−(2m+M)gLcosθ).
Les positions d’équilibre correspondent à des extrema de Ep.
Ep′=−2mΩ2L2sinθcosθ+(2m+M)gLsinθ.
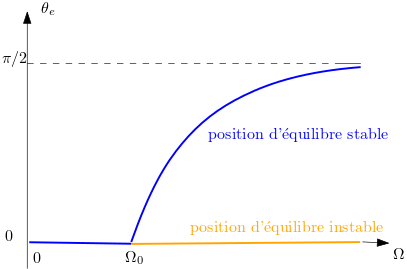
Ep′=0⟺sinθ=0 ou cosθ=2m2m+MLΩ2g.
-Pour Ω<2m2m+MLg, il y a une seule position d’équilibre θe,1=0. On vérifie avec E"p=−2mΩ2L2cos(2θ)+(2m+M)gLcos(θ), que E"p(θ=0)>0 dans ce cas ; c’est une position d’équilibre stable.
-Pour Ω>2m2m+MLg, il y a deux positions d’équilibre
θe,1=0. On vérifie que E"p(θ=0)<0 ; c’est une position d’équilibre instable.
θe,2=arccos(2m2m+MLΩ2g), qui est nécessairement un minimum d’énergie potentielle puisque θ1=0 est un maximum. On vérifie E"p=−2mΩ2L2[2cos2θe,2−1]+(2m+M)gLcos(θe,2)=2mΩ2L2[1−2(2m2m+MLΩ2g)2]+g22mΩ2(2m+M)2=2mΩ2L2−g22mΩ2(2m+M)2
qui est bien positif. θ2 est une position d’équilibre stable.
-Pour Ω=2m2m+MLg, θe,1=θe,2=0, E"p(0)=0,Ep(3)(0)=0, Ep(4)(0)>0, il s’agit bien d’un minimum d’énergie potentielle, l’équilibre est stable.
Exercice 146 ⭐️⭐️⭐️ Expérience avec un stylo, Spé hors PSI
L’expérience suivante est bien connue : un stylo (ou un balai…) étant placé horizontalement en équilibre sur ses deux index initialement immobiles, l’expérimentateur rapproche ses index. On voit alors la règle glisser sur un doigt, puis sur les deux, puis glisser seulement sur l’autre doigt, et le cycle recommence. L’exercice suivant propose une modélisation de cet effet.
D’après X PC
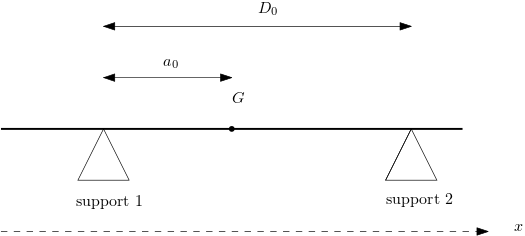
Une poutre rigide, homogène, d’épaisseur négligeable, de longueur L et de masse m, est posée horizontalement sur deux supports (1 et 2) séparés de la distance D0. Les coefficients de frottement statique et cinétique entre la poutre et un support sont fs et fc(fc<fs). Le centre d’inertie de la poutre G se trouve initialement à la distance a0<D0/2 du support 1.
La poutre est immobile. Déterminer les réactions verticales RN1 et RN2 exercées par les supports sur la poutre.
Dans toute la suite, les supports sont animés l’un vers l’autre de vitesses horizontales constantes 2v0ex et −2v0ex . La poutre ne peut se déplacer qu’en translation horizontale selon cette même direction. La distance entre les supports est D(t).
Exprimer les réactions normales RN1(t) et RN2(t) en fonction de a(t), distance entre G et le support 1 à la date t.
On suppose que la poutre glisse d’abord par rapport à l’un des supports. Lequel ? Quelles sont les forces horizontales F1 et F2 exercées par les supports sur la poutre pendant cette phase ? Montrer que ce mouvement cesse nécessairement à une date t1 et que la poutre se met à glisser sur l’autre support. Déterminer D(t1).
Montrer que la poutre glisse alors nécessairement sur les deux supports. Montrer que cette seconde phase cesse et donner le critère que détermine la fin de cette phase en précisant le support sur lequel le glissement cesse (sans chercher à déterminer exactement la date correspondante).
Décrire le mouvement ultérieur de la poutre.
Réflexes
Contacts entre solides 👉 Penser aux lois de Coulomb.
Solide en translation 👉 Le théorème du moment cinétique s’applique aussi dans ce cas 😀. Ne pas hésiter à l’utiliser quand le moment cinétique ou sa variation dans le temps est facile à calculer.
Corrigé
Dans le référentiel supposé galiléen du laboratoire R, la poutre est en équilibre sous l’action de son poids et des réactions des supports.
En appliquant le théorème du moment cinétique au point de contact I1 fixe (le moment cinétiue est nul puisque la poutre est immobile), on obtient en projection sur l’axe perpendiculaire au plan du graphique −a0mg+D0RN2=0.
De même, en appliquant le théorème du moment cinétique en I2, (D0−a0)mg−D0RN1=0.
D’où {RN1=D0D0−a0mgRN2=D0a0mg.
La poutre appuie davantage sur le support le plus près de son centre d’inertie.
Les points de contact ne sont plus fixes. On peut toujours se placer dans le référentiel barycentrique R∗, en translation par rapport à R, dans lequel G est immobile. La poutre est en équilibre dans R∗, sous l’action de son poids, des réactions des supports, et d’une éventuelle force d’inertie d’entraînement horizontale.
En appliquant le théorème de la résultante cinétique projeté verticalement −mg+RN1+RN2=0.
En appliquant le théorème du moment cinétique en G, projeté sur l’axe perpendiculaire au plan du graphique (ce moment cinétique ne varie pas, tous les points de la poutre ont la même vitesse selon (Ox)), −a(t)RN1+(D(t)−a(t))RN2=0.
On retrouve {RN1(t)=D(t)D(t)−a(t)mgRN2(t)=D(t)a(t)mg.
La poutre glisse sur un seul support, elle se déplace donc à la même vitesse (constante) que l’autre support. Son accélération est nulle, la force d’inertie d’entraînement aussi et la somme des forces exercées en projection sur (Ox) est nulle. D’où F1=−F2.
Pour le support i sur lequel la poutre glisse, ∥∥∥∥Fi∥∥∥∥=fcRNi, pour l’autre ∥∥∥∥Fj∥∥∥∥≤fsRNj<fcRNj.
Comme au début a(0)<D0/2, la poutre glisse en premier sur le
support 2.
Dans cette première phase, la vitesse de la poutre est 2v0ex, la force de frottement s’oppose à la vitesse de glissement, F2=−fcD(t)a(t)mgex=−fcD0−v0ta0mgex=−F1.
Lorsque le support 2 et G se rapprochent, RN2 , F2 et F1 augmentent, alors que RN1 diminue. La condition de non glissement sur le support 1 n’est plus vérifiée à partir de t1 tel que F1=fsRN1,
soit fcD0−v0t1a0mg=fsD0−v0t1D0−v0t1−a0,
soit t1=v0D0−(1+fc/fs)a0 et D(t1)=(1+fc/fs)a0<2a0.
À t1, le glissement apparaît sur le support 1. La vitesse de la poutre ne pouvant pas varier instantanément, le glissement se poursuit également sur le support 2.
En projection sur l’axe (Ox), les vitesses de glissement sur 1 et 2 sont vg1<0 et vg2>0. D’où F2=−fcRN2 et F1=fcRN1. Le théorème de la résultante cinétique dans R donne mx¨=F1+F2=fcmgD(t)D(t)−2a(t)<0.
La vitesse de la poutre x˙ diminue, ce qui augmente la valeur absolue de vg1=x˙−v0/2 et diminue celle de vg2=x˙+v0/2.
La phase de glissement sur les deux supports continue jusqu’à ce que vg2 s’annule (après changement de signe de x˙). Alors la poutre adhère au support 2 et continue à glisser sur le support 1.
On se retrouve dans une situation symétrique à la situation initiale, les rôles des supports 1 et 2 étant inversés. Le mouvement continue ainsi avec des successions de glissement sur un support, sur les deux, puis sur l’autre.
Remarque — Dans les expériences usuelles, par exemple ici, les doigts ne se déplacent pas à vitesse constante, mais on observe les phases de glissement et non glissement, les index se rencontrant finalement au centre d’'inertie de la “poutre”.
Exercice 156 ⭐️⭐️⭐️ Tomber plus vite que la chute libre, CCS2022 MP, Spé/L2
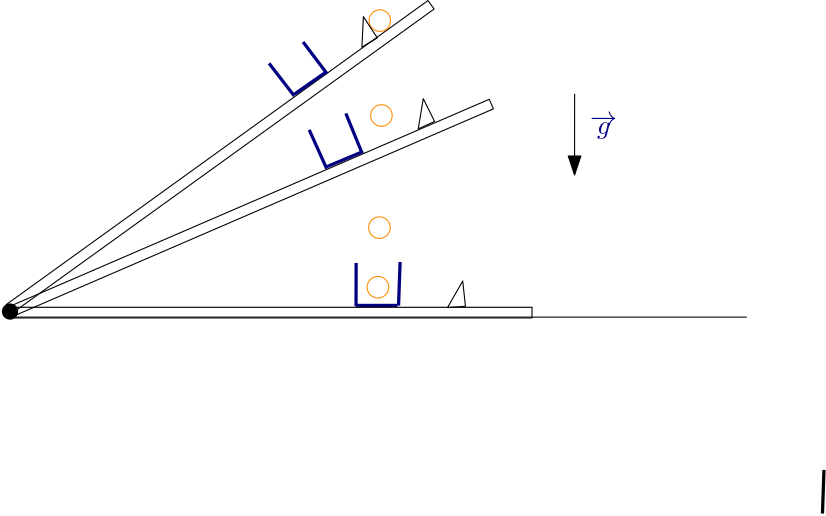
Une planche en bois de longueur L peut pivoter sans frottement autour d’un axe horizontal fixe passant par une de ses extrémités. Un gobelet de masse négligeable et une bille de masse m sont posés à l’instant t=0 sur la planche. Le gobelet est solidaire de la planche, la bille se trouve à la distance ℓ de l’axe de rotation.
On lâche la planche à t=0 avec une vitesse initiale nulle. L’angle entre la planche et le sol horizontal à l’instant t est θ(t).
On observe que le gobelet tombe plus vite que la bille, et la bille tombe dans le gobelet !
Données :
Le moment d’inertie de la planche par rapport à son axe de rotation est J=31ML2. θ0=θ(t=0)=30∘,L=1,0 m, ℓ=95 cm,g=9,8 m.s−2.
Exprimer le temps de chute de la bille et le calculer.
Déterminer l’équation différentielle vérifiée par θ(t).
En déduire l’expression de θ˙ en fonction de θ et des autres paramètres du problème.
On donne ∫0θ0sin(θ0)−sin(θ)dθ=1,52.
Calculer le temps de chute de la planche. Cette valeur est-elle cohérente
avec les observations ?
Réflexes
Équation différentielle vérifiée par θ˙ 👉 Le mouvement de la planche est un problème à un degré de liberté, une seule équation suffit : théorème de l’énergie cinétique (ou conservation de l’énergie mécaniue) ou théorème du moment cinétique. La mention de θ˙ suggère de passer par l’énergie, pour éviter d’avoir à intégrer.
Temps de chute à partir d’une équation reliant θ à sa dérivée première 👉 “Séparer les variables”.
Corrigé
La bille est initialement à l’altitude ℓcosθ0 , l’origine étant prise au sol. Le référentiel du laboratoire est supposé galiléen et la bille n’est
soumise qu’à son poids mg.
La seconde loi de Newton projetée sur l’axe vertical donne z¨=−g. Après avoir intégré deux fois z=ℓsinθ0−21gt2.
La date d’arrivée au sol et donc la durée de la chute est tbille=g2ℓsinθ0.
A.N. : t=0,31 s.
La planche est soumise dans le référentiel du laboratoire à son poids, et aux actions d’axe dont le travail est nul (pas de frottement). La conservation de l’énergie mécanique de la planche donne Em=Ec+Ep=21Jθ˙2+MgzG=21Jθ˙2+Mg2Lsin(θ).
À t=0, Em=Mg2Lsin(θ0) . D’où 21Jθ˙2+Mg2Lsin(θ)=Mg2Lsin(θ0).
Avec θ˙<0, θ˙=−L3g[sin(θ0)−sin(θ)](homogeˋne).
dtdθ=−L3g[sin(θ0)−sin(θ)].
En séparant les variables, dt=−3gLsin(θ0)−sin(θ)dθ.
La durée de chute, pour aller de l’angle θ0 à 0, est tplanche=−3gL∫θ00sin(θ0)−sin(θ)dθ=3gL∫0θ0sin(θ0)−sin(θ)dθ.
Numériquement tplanche=1,523x9,81=0,28 s.
La planche et le gobelet tombent donc plus vite que la bille en chute libre, et la bille peut atterrir dans le gobelet.
Remarque ___ Le résultat peut sembler surprenant, mais les actions d’axe, en contraignant l’extrémité de la planche à rester fixe, contribuent à l’accélération de la planche. Cette expérience est proposée par n° de décembre 2013 de “Pour la Science”, J-M Courty et E. Kierlik.
Evidemment, il y a des contraintes à respecter pour que l’expérience fonctionne, par exemple θ0 doit être suffisamment petit pour que l’accélération verticale du gobelet soit supérieure en valeur absolue à celle de la bille.
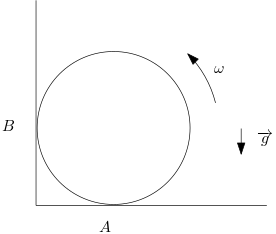
Exercice 157 ⭐️⭐️ Cylindre qui frotte contre un mur, CCMP MP 2022, Spé hors PSI/L2
Un cylindre, de masse M, de rayon R, de centre de masse G, est placé sur le sol (contact au point A), tangent à un mur (au point B). Le cylindre tourne initialement à la vitesse angulaire ω0, son centre d’inertie restant fixe.
Le moment d’inertie du cylindre par rapport à son axe est J=21MR2, et le coefficient de frottement f est supposé identique en A et en B.
Déterminer le nombre N de tours que fait le cylindre avant de s’arrêter.
Réflexes
Contact entre solides avec frottement 👉 Lois de Coulomb.
Solide en rotation autour d’un axe fixe 👉 Une seule équation suffit (théorème de l’énergie cinétique ou du moment cinétique scalaire) si on connait les forces. Mais ici les forces de frottement qui travaillent sont à déterminer 👉 Nécessité d’utiliser le théorème du centre de masse.
Corrigé
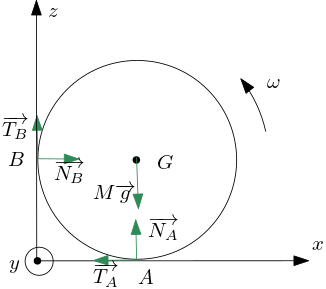
Dans le référentiel terrestre supposé galiléen, le cylindre est un solide en rotation autour d’un axe fixe. Les actions exercées sur le cylindre sont
son poids Mg
la réaction du sol RA=NAez+TAex
la réaction du mur RB=NBex+TBez.
Le théorème du centre de masse donne Mg+RA+RB=0,
soit (1){−Mg+NA+TB=0TA+NB=0. Remarque ___ Le cylindre reste au contact du mur sans s’en éloigner, ce qui impose le sens de rotation. On le retrouve “avec les équations” en exprimant que le contact avec le mur correspond une réaction normale exercée par le mur dirigée vers le cylindre, soit NB>0, ce qui impose TA<0, et avec les lois de Coulomb impose le sens de rotation du cylindre (la réaction tangentielle est de sens contraire à la vitesse de glissement du cylindre sur le mur).
Il y a glissement sur le mur et sur le sol, d’où avec les lois de Coulomb TA=−fNA et TB=fNB.
Avec (1), {NA+fNB=g−fNA+NB=0.
Soit NA=1+f2Mg et NB=1+f2fMg
Enfin, le théorème du moment cinétique scalaire appliqué par rapport à l’axe fixe Gy donne Jω˙=(GA∧TA+GB∧TB).ey⇒Jω˙=−RfNA−RfNB=−R1+f21+fMg.
L’accélération angulaire est constante, ω˙=−R2g1+f21+f, et ω(t)=ω0−R2g1+f21+ft.
On en déduit l’angle dont tourne le cylindre en intégrant α(t)=ω0t−Rg1+f21+ft2
Le cylindre s’arrête quand ω(t)=0, soit t=t0=2gRω01+f1+f2 et α(t0)=4gω02R1+f1+f2, homogène.
Le nombre total de tours est N=2πα(t0)=8πgω02R1+f1+f2.
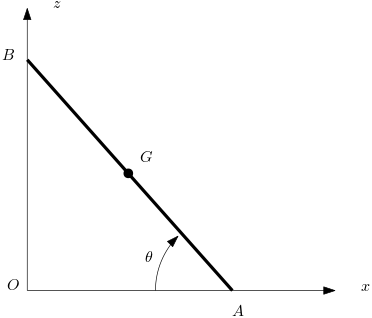
Exercice 164 ⭐️⭐️ Équilibre d’une échelle, classique, Spé/L2
Une échelle de masse m assimilée à une tige homogène de longueur 2L et de centre d’inertie G est en équilibre contre un mur. Le coefficient de frottement en A, point d’appui sur le sol, est μ. On néglige les frottements au niveau du mur (point B).
Quelle est la condition sur l’angle θ pour que l’échelle reste en équilibre ?
Réflexes
Solide en équilibre 👉 La somme des moments des forces exexercées sur le solide est nulle ET la somme des moments des forces exercées, calculés par rapport à un point fixe, est nulle.
Condition d’équilibre avec frottement 👉 Lois de Coulomb.
Corrigé
Les forces extérieures exercées sur la planche sont
-le poids, équivalent à une force mg s’appliquant en G,
-la réaction normale en B, NB=NBex,
-la réaction du sol, avec sa composante normale au support et sa composante tangentielle RA=NA+TA=NAez+TAex. A priori le réaction tangentielle s’oppose à un éventuel glissement, on attend TA<0.
À l’équilibre, la somme des forces extérieures est nulle, RA+NB+mg=0.
En projetant sur les axes (Ox) et (Oz) : {NA−mg=0NB+TA=0.
L’équilibre implique aussi que la somme des moments des forces extérieures, calculés par rapport à un point fixe, est nulle.
Le choix du point A (fixe à l’équilibre) permet de ne pas faire intervenir les deux composantes de RA). En projection sur (Ay) (AG∧mg+AB∧NB).ey=0,
soit directement en utilisant les bras de levier, −mgLcosθ+NB2Lsinθ=0⟺NB=2mgcotan θ.
Il s’en déduit TA=−2mgcotan θ et toujours NA=mg.
Pour que l’équilibre soit possible, les lois de Coulomb pour le non glissement indiquent que ∣TA∣≤μ∣NA∣. D’où la condition cherchée tanθ≥2μ1.
Le résultat est cohérent, pour les petits angles θ, on s’attend
à ce que la planche glisse sur le sol.