Exercice 36 ⭐️ Equilibre dans un ascenseur, Spé hors PSI/L2
Un parpaing est posé sur un capteur de force dans un ascenseur. L’ascenseur se trouvant initialement au second étage se met en mouvement à la date t=4 s. Le module F de la force exercée par le parpaing sur le capteur, et mesurée par celui-ci, prend les valeurs suivantes
⎩⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎧0≤t<4,0 s4,0≤t<6,0 s6,0≤t<12,0 s4,0≤t<6,0 st>14,0 sF=100 NF=Fmax=113 NF=100 NF=Fmin=87 NF=100 N. On prendra le champ de pesanteur de norme 10,0 m.s−2.
Déterminer la masse du parpaing, le nombre d’étages parcourus et l’étage d’arrivée.
Corrigé
• Pour t<4,0 s, l’ascenseur est au repos. Dans le référentiel galiléen R lié au sol, le parpaing est en équilibre sous l’action de:
son poids mg
la réaction F exercée par le capteur, dont la norme est la valeur indiquée par le capteur.
F+mg=0, d’où m=gF. La réaction F est évidemment orientée selon la verticale ascendante (Oz).
A.N. : m=10,0 kg.
À t=4,0 s , l’ascenseur se met en mouvement, le référentiel R′ lié à l’ascenseur est en translation par rapport au référentiel R. Soit a0 l’accélération d’un point fixe 0 de l’ascenseur par rapport au référentiel R.
• Pour 4,0<t<6,0 s , le parpaing est en équilibre dans R′ sous l’action de
son poids mg
la réaction F
la force d’inertie d’entraînement fie=−mae=−ma0
F+mg−ma0=0. D’où a0=g+mF.
Le parpaing reste au contact du capteur (puisque la réaction ne s’annule pas), F est donc portée par la verticale ascendante. a0=−guz+mFuz.
A.N. : a0=(−10,0+113/10)uz=1,13uz.
L’ascenseur accélère uniformément en montant pendant 2,0 s. Sa vitesse à t1=6,0 s est V(t1)=2,3uz en m.s−1, et l’altitude du point O a varié de z(t2)−z(t1)=21a0(t1−t0)2, soit z(t2)−z(t1)=2,3 m.
• Pour 6,0<t<12,0 s , On retrouve la valeur initiale de F, donc l’accélération de l’ascenseur est nulle dans R et sa vitesse reste constante. Il parcourt z3−z2=V(t1)(t3−t2), soit z(t3)−z(t2)=13,6 m.
• Pour 12,0<t<14,0 s , la valeur de F est symétrique de celle entre 2,0 et 4,0 s par rapport à 100 N. On obtient cette fois une décélération de l’ascenseur qui freine avec une accélération opposée à celle qu’il avait entre 2 et 4 s : a0=−1,13uz. La durée du mouvement étant identique, sa vitesse à t=14,0 s est nulle et il a parcouru z(t4)−z(t3)=z(t2)−z(t1)=2,3 m.
L’ascenseur a donc parcouru en tout : 2,3 + 13,6 + 2,3 = 18,2 m, soit 6 étages en considérant une hauteur de 3 m par étage. Il se trouve finalement au 8eˋme étage.
Exercice 52 ⭐️⭐️ Points de Lagrange (1), L2/Spé hors PSI
La Terre, de centre d’inertie T, est en mouvement circulaire uniforme à la vitesse angulaire ω autour du Soleil, de centre d’inertie S. On se place dans le référentiel tournant à la vitesse angulaire ω autour du Soleil, dont (S,ex,ey,ez) est un repère orthonormé. ST=STex et ez est perpendiculaire au plan de révolution de la Terre. La masse MT de la Terre étant très petite devant la masse M du Soleil, on considére que le centre de gravité du système Terre-Soleil est en S.
Un satellite de masse m est placé au voisinage de la Terre en un point A(x,y,z). On pose x=D+x′, où D est la distance Terre-Soleil, on suppose ∣x′∣,∣y∣,∣z∣≪D.
Écrire la résultante de la force d’inertie d’entraînement et de la force de gravitation solaire qui s’exercent sur le satellite. Exprimer ω en fonction de G,M et D, et développer la résultante à l’ordre 1 en x′/D,y/D,z/D.
Montrer qu’il existe deux positions d’équilibre pour le satellite sur l’axe (Ox), situées de part et d’autre de la Terre à une distance d qu’on exprimera en fonction de D,M et MT. On note L1 et L2 les points correspondants à ces positions d’équilibre, dits points de Lagrange. Par convention, L2 est le plus éloigné du Soleil.
A.N. : MT/M=3x10−6. Calculer d. L’approximation faite à la question 1 est-elle valable aux points L1 et L2 ?
On n’impose plus ∣x′∣,∣y∣,∣z∣≪D. Montrer qu’un troisième point de Lagrange est possible sur l’axe Soleil-Terre (qualitatif).
Réflexes
Référentiel en rotation à ω constant par rapport à un référentiel galiléen
👉 fie(M)=mω2SM.
Corrigé
La force d’inertie centrifuge exercée sur le satellite est fie=mω2SA.
La force de gravitation solaire exercée sur le satellite est fg=−GSA3mMSA. La résultante en A est R=mω2SA−GSA3mMSA.
La force d’inertie centrifuge exercée sur la Terre est Fie=MTω2ST.
La force de gravitation solaire exercée sur la Terre est Fg=−GST3MTMST.
La Terre est en équilibre dans le référentiel tournant sous l’action de ces deux forces, d’où : MTω2ST−GST3MTMST=0. ω=ST3GM=D3GM.
En remplaçant, R=GmM⎣⎢⎢⎡D31−[(D+x′)2+y2+z2]3/21⎦⎥⎥⎤[(D+x′)ux+yuy+zuz].
A l’ordre 1 en x′/D,y/D,z/D,
R=GmM[D31(D3x′)][Dux]=GmMD33x′ux.
Dans le référentiel tournant, le satellite est soumis à R et à l’attraction gravitationnelle terrestre (on ne tient pas compte de la force de Coriolis car on cherche une position d’équilibre). À l’équilibre les deux forces se compensent. R étant portée par ux, cela impose que les positions d’équilibre sont sur l’axe (Ox), et
GmMD33x′ux−∣x′∣3GmMTx′ux=0, soit d=∣x′∣=D(MMT)1/3.
Avec D=1,5.108 de km, d=2,1.104 km, petit devant D.
La force gravitationnelle exercée par la Terre doit être de sens contraire à R. Il existe une possibilité d’équilibre pour un point situé de l’autre côté du Soleil par rapport à la Terre. L’attraction de la Terre étant faible par rapport à celle du Soleil, L3 est pratiquement symétrique de T par rapport au Soleil.
Les points L1 et L2 sont des équilibres instables (comme L3, qui est un peu plus loin de nous 😀), ce qui les rend utilisables dans le cadre de missions spatiales : on n’y trouve pas de corps naturels, et un équilibre dynamique peut y être maintenu pour un apport énergétique raisonnable (le champ gravitationnel étant faible dans leur voisinage). Voir la liste des objets qui s’y trouvent ici.
Le point L1 se prête particulièrement à l’observation du Soleil et du vent solaire. Actuellement, on peut y trouver par exemple l’observatoire solaire spatial SoHo. Au point L2 devrait se trouver prochainement le James Webb Space Telescope (lancement prévu en 2021).
Exercice 53 ⭐️⭐️⭐️⭐️ Points de Lagrange (2), L2/Spé hors PSI
Les points de Lagrange du système Soleil-Terre sont des points de l’espace qui correspondent à une position d’équilibre pour un satellite soumis à l’attraction gravitationnelle du Soleil et de la Terre. Il y a en tout cinq points de Lagrange.
Trois d’entre eux sont situés sur l’axe Soleil-Terre (voir exercice 52). Pour étudier les deux autres positions L4 et L5, il faut prendre en compte le fait que le Soleil S et la Terre T sont en rotation autour de leur centre d’inertie C à la vitesse angulaire Ω.
On pose rT=CT,rS=CS,rP=CP.
Exprimer le théorème du centre de masse à la Terre (référentiel au choix), exprimer Ω en fonction de MS,MT,G et de la distance ST.
Le référentiel R" possède C comme point fixe, qu’on prend comme origine ; l’axe (ST) est confondu avec l’axe (Cx) de ce référentiel.
Exprimer la condition d’équilibre d’un point P de masse m dans le référentiel R".
On étudie les positions qui ne sont pas sur l’axe (Cx). Projeter la relation obtenue en 2).
a. sur (Cy), axe du plan (S,T,P) perpendiculaire à (Cx).
b. sur l’axe (CY) de vecteur unitaire u, axe du plan (S,T,P) perpendiculaire à (CP).
Caractériser géométriquement les positions L4 et L5. On montrera que chacun de ces points forme avec S et T un triangle dont on précisera les caractéristiques. L4 et L5 sont des positions d’équilibre stables pour le système Terre-Soleil (voir l’animation de Geneviève Tulloue, et tracer les équipotentielles); sont-elles adaptées pour y positionner des satellites ?
Indices
2 ) Ne pas oublier la force d’inertie centrifuge. La force de Coriolis n’est pas à prendre en compte puisqu’on cherche une position d’équilibre.
4 ) Remarquer que rS et rT sont parallèles, et utiliser la définition du centre de masse.
Corrigé
Dans le référentiel galiléen de point fixe C, le théorème du centre de masse donne en projection sur (CT):
MTΩ2CT=GMTMS/ST2.
Avec TC=MT+MSMSTS par définition de C, Ω2=GST3MT+MS.
Dans R”, l’équilibre de P sous l’action de la force gravitationnelle du Soleil, celle exercée par la Terre, et de la force d’inertie d’entraînement fie=mΩ2CP donne −GMS∥∥∥∥rP−rS∥∥∥∥3rP−rS−GMT∥∥∥∥rP−rT∥∥∥∥3rP−rT+Ω2rP=0.
soit −MS∥∥∥∥rP−rS∥∥∥∥3rP−rS−MT∥∥∥∥rP−rT∥∥∥∥3rP−rT+∥∥∥∥rS−rT∥∥∥∥3MT+MSrP=0.
En projetant sur (Cy), −∥∥∥∥rP−rS∥∥∥∥3MS−∥∥∥∥rP−rT∥∥∥∥3MT+∥∥∥∥rS−rT∥∥∥∥3MT+MS=0. (1)
En projetant sur l’axe (CY), MS∥∥∥∥rP−rS∥∥∥∥3rS.u+MT∥∥∥∥rP−rT∥∥∥∥3rT.u=0. (2)
Comme rS et rT sont parallèles, (2) donne (u.ux=0 quand P n’est pas sur (Cx)), MS∥∥∥∥rP−rS∥∥∥∥3rS+MT∥∥∥∥rP−rT∥∥∥∥3rT=0.
Or MSrS+MTrT=0 par définition du centre de masse, donc ∥∥∥∥rP−rS∥∥∥∥3=∥∥∥∥rP−rT∥∥∥∥3.
Soit SP=TP. Alors (1) donne TS=SP=TP. Les positions L4 et L5 forment chacune avec S et T un triangle équilatéral.
L4 et L5 étant des positions stables sont potentiellement déjà occupées par des astéroïdes ou poussières. Effectivement, un astéroïde (TK7) a été observé au point L4 du système Soleil_Terre en 2011.
Concernant d’autres systèmes, on a recensé dans le système Soleil-Jupiter (en 2011) environ 5 000 astéroïdes aux points L4 et L5. De même, il a été un temps envisagé de placer un télescope spatial au point L4 ou L5 du système Terre-Lune, mais cette option a été abandonnée après que des nuages de poussière y ont été observés.
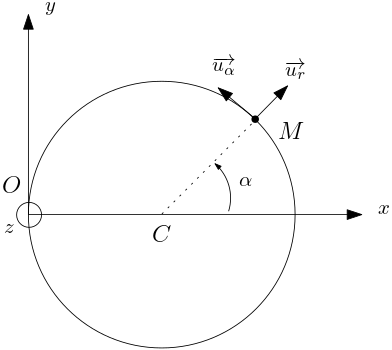
Exercice 65 ⭐️⭐️ Perle sur un cerceau, Spé hors PSI/L2/Classique
Un cerceau horizontal de centre C, de rayon R, est soudé en un de ses points, O, à une tige verticale (Oz) perpendiculaire au plan de la figure. Le cerceau tourne avec une vitesse angulaire constante ω autour de (Oz). Une perle M de masse m peut coulisser sans frottement sur le cerceau. α est l’angle entre OC=Rux et CM=Rur. Le mouvement de la perle est étudié dans le référentiel mobile R′, d’axes (Ox),(Oy),(Oz) fixes dans R′.
Déterminer l’équation vérifiée par α en utilisant le principe fondamental de la dynamique.
Déterminer les positions d’équilibre et discuter leur stabilité.
Retrouver le résultat par une méthode énergétique.
Réflexes
R′ est en rotation pure par rapport au référentiel galiléen du laboratoire 👉 fie=mω2HM=mω2OM et fic=−2mω∧v(M)R′.
Corrigé
Le référentiel du laboratoire R est supposé galiléen. Dans R′, en rotation par rapport R avec ω=ωuz, les actions exercées sur la perle sont
-son poids mg.
-la réaction du cerceau N normale au cerceau.
-la force d’inertie d’entraînement fie=mω2OM=mω2(OC+CM)=mω2R[(1+cosα)ur−sinαuα].
-la force d’inertie de Coriolis fic=−2mω∧v(M)R′=−2mωRα˙uz∧uα=2mωRα˙ur.
Dans R′, M a un mouvement circulaire, et a(M)=−Rα˙2ur+Rα¨uα. En projetant le principe fondamental de la dynamique sur ur,uα,uz : ⎩⎪⎪⎨⎪⎪⎧−mRα˙2=Nr+2mωRα˙+mω2R(1+cosα)mRα¨=−mω2Rsinα0=Nz−mg.
D’où l’équation vérifiée par α :
α¨=−ω2sinα.
α¨=0⇒α=0 ou π.
Pour α≪1, α¨+ω2α=0,on obtient des oscillations autour de 0, la position α=0 est stable.
Pour α=π+ε, avec ε≪1, ε¨−ω2ε=0, la position α=π est instable.
La réaction et la force de Coriolis ne travaillent pas. Le poids non plus puisque le mouvement est horizontal. La force d’inertie d’entraînement dérive de l’énergie potentielle Ep=21mω2r2=21mω2R2[(1+cosα)2+sin2α]=mω2R2[1+cosα]. Ep′=−mω2R2sinα s’annule pour 0 et π qui sont les positions d’équilibre. Ep′′=mω2R2cosα est positive pour la position d’équilibre stable, soit α=0, et négative pour la position instable α=π.
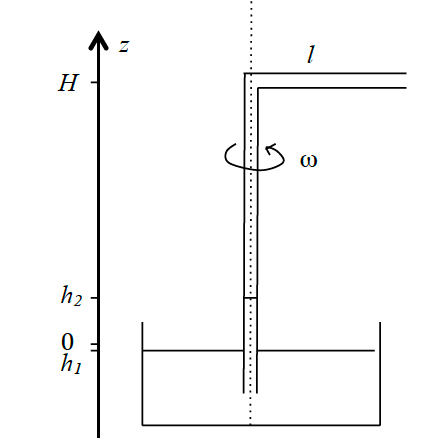
Exercice 79 ⭐️⭐️⭐️ Tube coudé en rotation, PC
Un tube coudé de section s=2 cm2 est plongé dans un récipient d’eau de surface libre S=100 cm2. Initialement, l’altitude des deux surfaces libres est égale à 0. L’eau dans le récipient est de masse volumique constante μ0. L’air est assimilé à un gaz parfait de masse volumique ρ. Hors du tube, l’air est à la pression P0 et à la température T0=290 K.
Le tube coudé, dont le coude est à l’altitude H=1,0 m et dont le bras horizontal a une longueur l=50 cm, est mis en rotation à la vitesse angulaire ω=25 rads/s autour de l’axe vertical. Une dénivellation entre le niveau de l’eau dans le tube (altitude h2), et la surface libre de l’eau dans le récipient (altitude h1) apparaît. On néglige tout phénomène de capillarité et de viscosité.
La masse volumique de l’air peut être considérée constante.
Déterminer les altitudes des surfaces libres de l’eau.
Même question qu’en 1. en supposant que l’évolution de l’air dans le milieu est isentropique. Le résultat est-il numériquement différent ?
Réflexe
Fluide en équilibre dans un référentiel 👉 Loi de la statique des fluides dans ce référentiel, en tenant compte de la force d’inertie d’entraînement.
Corrigé
Exprimons l’équilibre de l’air dans le référentiel tournant à la vitesse angulaire ω autour de l’axe vertical.
L’air de la partie horizontale est en équilibre sous l’action de la force centrifuge, la résultante des forces de pression, le poids et la réaction du tube.
En projetant la relation de la statique des fluides sur l’axe tournant exprimée à la distance r de l’axe, drdP=ρω2r ⇒P(r,z=H)=P0−21ρω2(l2−r2).
On en déduit que P(r=0,z=H)=P0−21ρω2l2.
A.N. P(r=0,z=H)−P0=−21ρω2l2=−101 Pa.
Pour la partie verticale du tube, P(r=0,z=h2)=P(r=0,z=H)+ρg(H−h2)=P0−21ρω2l2+ρg(H−h2).
La loi de l’hydrostatique appliquée à l’eau donne P(z=h1)=P0 et P(z=h2)=P0−μ0g(h2−h1). P(r=0,z=h2)=P0−21ρω2l2+ρg(H−h2)=P0−μ0g(h2−h1).
Par conservation du volume d’eau : Sh1+sh2=0.
Donc −21ρω2l2+ρg(H−h2)=−μ0gh2(1+Ss), soit
21ρω2l2−ρgH=h2g[μ0(1+Ss)−ρ]. Compte tenu de μ0≫ρ, h2==gμ0(1+Ss)21ρω2l2−ρgH,
et h1=−Ssh2.
A.N. h2=9 mm et h1=-0,2 mm.
2.b1. Dans la partie horizontale drdP=ρω2r avec ρ=RTPM. Pour une évolution isentropique d’un gaz parfait : T=T0(PP0)γ1−γ, soit ρ=RTPM=RT0P0γ1−γP1/γM et
P1/γdP=RT0P0γ1−γMω2rdr. En intégrant γ−1γ(Pγγ−1−P0γγ−1)=−21RT0MP0γγ−1ω2(l2−r2).
Pour r=0, P(r=0,z=H)=P0(1−2γγ−1RT0Mω2l2)γ−1γ homogène.
Un traitement équivalent peut être fait dans la partie verticale.
Cela donne la même valeur numérique qu’en 1.
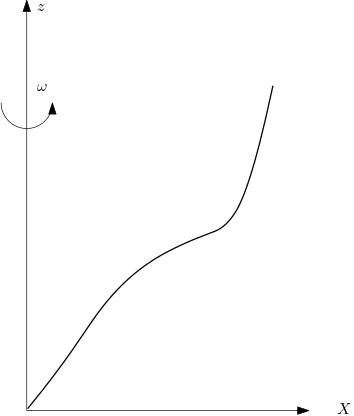
Exercice 105 ⭐️⭐️⭐️ Equilibre sur une tige, X MP 2019, MP/PC/L2
Une tige rigide, de profil vertical z=f(X), est en rotation autour de l’axe Oz vertical ascendant à la vitesse ω fixée. Une petite masse m peut y coulisser sans frottements.
Quelle condition doit vérifier f pour qu’il existe une position X de la masse telle qu’elle y soit en mouvement circulaire uniforme d’axe Oz ?
Cette position est-elle stable ou instable ?
Réflexe
Stabilité d’une position d’équilibre 👉 Si on peut définir une énergie potentielle, une position d’équilibre stable correspond à un minimum de l’énergie potentielle. Sinon, il faut regarder ce qui se passe quand on écarte légèrement le système de sa position d’équilibre.
Corrigé
Le référentiel terrestre est supposé galiléen.
Dans le référentiel tournant avec le fil R′, de base fixe (uX,uY,uz), la masse en équilibre est soumise à l’action
de son poids mg=−mguz.
de la réaction du fil R=RXeX+RYeY+Rzez
de la force d’inertie d’entraînement fie=mω2XeX.
Méthode 1
La réaction, normale au déplacement dans R′, ne travaille pas. L’énergie potentielle est la somme de l’énergie potentielle centrifuge et de l’énergie potentielle de pesanteur. Ep=−21mω2X2+mgz=−21mω2X2+mgf(X)
à une constante près. D’où Ep′=−mω2X+mgf′(X).
Pour qu’un équilibre soit possible, il faut donc qu’il existe X=X0 tel que f′(X0)=gω2X0. Méthode 2
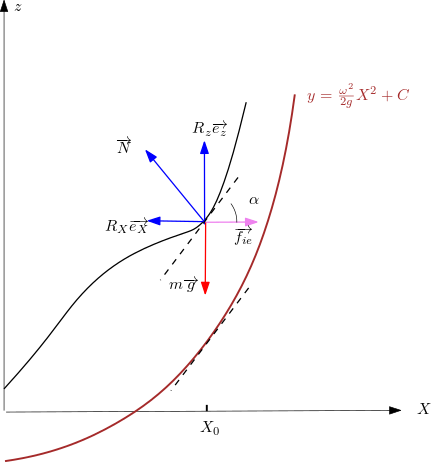
Soit α,(−π/2<α<π/2), l’angle que fait la tangente au fil au point M avec l’axe horizontal (OX). Alors tanα=dXdz=f′(X).
La réaction est normale au fil, d’où R=−NsinαeX+RYeY+Ncosαez, où N est la norme de la composante de la réaction dans le plan (XOz).
Le point M correspond à une position d’équilibre dans R′ pour
⎩⎪⎪⎨⎪⎪⎧−Nsinα+mω2X=0Ry=0Ncosα−mg=0.
D’où ω2X=gtanα=gf′(X), on retrouve le résultat précédent.
Plus X0 et ω sont grands, plus la force d’inertie est grande, et donc plus la réaction horizontale doit être importante pour la compenser. Or la réaction verticale compense le poids, et, à réaction verticale donnée, la réaction horizontale est plus grande lorsque la tige est plus inclinée (α proche de π/2). Il est donc cohérent que la position d’équilibre corresponde à une inclinaison de la tige d’autant plus grande que X0 et ω sont grands.
La masse n’intervient pas ici car elle apparaît à la fois dans le poids et la force d’inertie.
S’il y a mouvement dans R′, il faut tenir compte de la force d’inertie de Coriolis. Mais la force de Coriolis ne travaille jamais. On peut continuer à utiliser l’énergie potentielle précédente, et évaluer sa dérivée seconde par rapport à X. Ep′′=−mω2+mgf′′(X).
Ainsi, un équilibre stable peut être obtenu s’il existe X0 tel que {f′(X0)=gω2X0f"(X0)>gω2.
La dérivée seconde est alors plus grande que celle de la parabole du schéma.
En revanche, si {f′(X0)=gω2X0f"(X0)<gω2,
l’équilibre est instable.
Quand il y a égalité f"(X0)=gω2, la stabilité ou non dépend du signe de f′′′(X0).
Finalement, la courbure du fil au point d’équilibre doit être suffisamment petite pour que l’équilibre soit stable, et que la réaction tende à ramener le point vers sa position d’équilibre lorsqu’on l’en écarte légèrement.
Remarque — On peut envisager de revenir aux équations du mouvement, avec z=f(X)⇒z˙=X˙f′(X)⇒z¨=X¨f′(X)+X˙2f"(X).
mais c’est beaucoup plus laborieux.
Remarquons que la force de Coriolis permet de déterminer la réaction RY. fic=−2mω∧vR′=−2mωez∧v[cosαeX+sinαez]=−2mωcosαeY.
Les équations du mouvement sont alors ⎩⎪⎪⎨⎪⎪⎧mX¨=mω2X−Nsinα0=Ry−2mωcosαmz¨=−mg+Ncosα.
Exercice 125 ⭐️⭐️⭐️ Position d’équilibre d’un système, X MP 2021, Spé hors PSI/L2
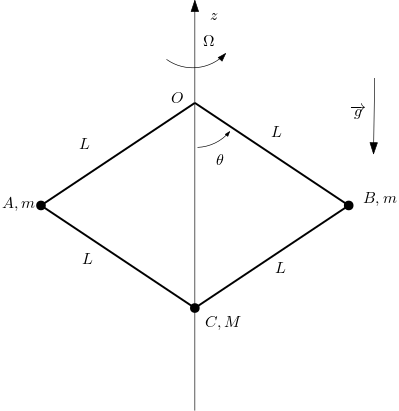
Un système en rotation à la vitesse angulaire Ω autour d’un axe vertical (Oz) est composé de trois masses mobiles situées en A,B, et C de masses respectives m, m, et M, liées entre elles et au point fixe O par des tiges rigides de masse négligeable, de longueur identique L. Le point C est astreint à coulisser sans frottement sur l’axe (Oz). L’ensemble des masses et des tiges reste dans un plan, et les liaisons mécaniques du système sont des liaisons rotule sans frottement. Déterminer les positions θe d’équilibre du système.
Réflexe
Problème à un degré de liberté θ 👉 Possibilité de se limiter à une approche énergétique (ou au théorème du moment cinétique scalaire, moins commode ici).
Corrigé
Attention ici Ω=θ˙.
Il s’agit d’un équilibre dans le référentiel tournant à la vitesse angulaire Ω autour de (Oz), ce qui correspond dans le référentiel terrestre galiléen à une trajectoire circulaire uniforme de A et B à la vitesse angulaire Ω autour de l’axe (Oz), de rayon Lsinθ.
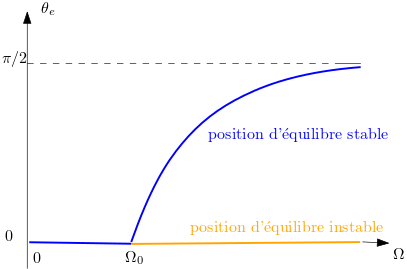
Qualitativement, quand la vitesse angulaire augmente, on s’attend à une augmentation de θ jusqu’à la valeur limite π/2.
Étudions l’équilibre du système dans le référentiel tournant non galiléen. A et B sont soumis à
leur poids
les actions de liaison
la force d’inertie d’entraînement centrifuge fie=mΩ2rur=mΩ2Lsinθur, avec ur le vecteur unitaire radial (vecteurs opposés pour A et B) .
Les actions de contact sans frottement ont une puissance nulle. Le poids dérive de l’énergie potentielle Ep1=−mgLcosθ, et la force d’inertie dérive de Ep2=−21mΩ2r2=−21mΩ2L2sin2θ, à une constante près.
Le point C est soumis à son poids qui dérive de l’énergie potentielle Ep3=−Mg2Lcosθ, et aux actions de liaison de puissance nulle.
L’énergie potentielle totale du système est Ep=2(Ep1+Ep2)+Ep3=−mΩ2L2sin2θ−(2m+M)gLcosθ).
Les positions d’équilibre correspondent à des extrema de Ep.
Ep′=−2mΩ2L2sinθcosθ+(2m+M)gLsinθ.
Ep′=0⟺sinθ=0 ou cosθ=2m2m+MLΩ2g.
-Pour Ω<2m2m+MLg, il y a une seule position d’équilibre θe,1=0. On vérifie avec E"p=−2mΩ2L2cos(2θ)+(2m+M)gLcos(θ), que E"p(θ=0)>0 dans ce cas ; c’est une position d’équilibre stable.
-Pour Ω>2m2m+MLg, il y a deux positions d’équilibre
θe,1=0. On vérifie que E"p(θ=0)<0 ; c’est une position d’équilibre instable.
θe,2=arccos(2m2m+MLΩ2g), qui est nécessairement un minimum d’énergie potentielle puisque θ1=0 est un maximum. On vérifie E"p=−2mΩ2L2[2cos2θe,2−1]+(2m+M)gLcos(θe,2)=2mΩ2L2[1−2(2m2m+MLΩ2g)2]+g22mΩ2(2m+M)2=2mΩ2L2−g22mΩ2(2m+M)2
qui est bien positif. θ2 est une position d’équilibre stable.
-Pour Ω=2m2m+MLg, θe,1=θe,2=0, E"p(0)=0,Ep(3)(0)=0, Ep(4)(0)>0, il s’agit bien d’un minimum d’énergie potentielle, l’équilibre est stable.