Dans le modèle de Bohr de l’atome d’hydrogène, l’électron M ( ponctuel) tourne autour du proton (ponctuel et immobile en O) en décrivant une orbite circulaire de rayon r=OM . uz est le vecteur unitaire normal au plan de l’orbite. L’électron est repéré par ses coordonnées polaires (r,θ). L’interaction gravitationnelle est négligée.
Rappeler l’expression de la force électrique exercée par le proton sur l’électron.
Par l’application du théorème de la quantité de mouvement, déduire la norme v de la vitesse de l’électron en fonction entre autres du rayon r de l’orbite.
Rappeler l’expression de l’énergie potentielle électrostatique Ep de l’électron. Montrer que l’énergie cinétique Ec de l’électron vérifie : Ec=−Ep/2.
Exprimer la norme L du moment cinétique en O de l’électron en fonction de r,me,e,ε0.
De l’égalité L=nℏ (postulée par Bohr en 1913), déduire la relation de quantification du rayon rn de l’orbite caractérisée par l’entier n, rn=aBn2 avec aB le rayon de Bohr à exprimer en fonction de me,e,ε0,ℏ.
En déduire l’énergie mécanique En=−Ry/n2, avec Ry la constante énergétique de Rydberg.
Quelle est la signification du rayon de Bohr ?
Donner la valeur de aB en picomètres et celle de Ry en électron-volts.
Exprimer le module de la vitesse vn de l’électron sur l’orbite n en fonction de n,Ry,me.
Donner la valeur numérique de v1. Commenter.
Données :
charge élémentaire e=1,60.10−19C.
masse de l’électron me=9,11.10−31kg.
permittivité diélectrique du vide ε0=8,85.10−12F.m−1.
constante de Planck h=6,63.10−34J.s..
Corrigé
F=−4πε0r2e2ur.
En référentiel supposé galiléen, le théorème de la quantité de mouvement appliqué à l’électron donne : medtdV=F. Par projection sur ur et uθ
⟹{merv2=−4πε0r2e2medtdv=0. D’où
v=4πmeε0re2.
dEP=−F.dOM⟹EP=−4πε0re2,
qui donne EC=21mev2=8πε0re2=−EP/2.
L=OM∧meV=rur∧mevuθ, d’où
L=4πε0mere2..
L=nℏ⟹rn=mee24πε0ℏ2n2. Le rayon de Bohr est donc
aB=mee24πε0ℏ2.
En=EC+EP=−8πε0re2=−8πε0aBn2e2. Donc En=−n2Ry avec
Ry=8πε0aBe2=32π2ε02ℏ2mee4 .
n≥1, aB est le plus petit rayon orbital.
A.N. : aB=52,9 pm, Ry=13,6 eV.
En=EC+EP=−EC=−21mevn2. D’où
vn=men22Ry..
A.N. v1=2,19.106m/s . Le mouvement de l’électron est non relativiste (la vitesse est inférieure à c/100).
Exercice 11 ⭐️ Vitesse de libération, Sup/L1
Quel est le rayon d’une planète de masse M=MT=6.1024 kg, dont un humain pourrait s’échapper en sautant à pieds joints ?
Donnée : constante de gravitation universelle G=6,67.10−11m3.kg−1.s−2.
Corrigé:
La vitesse de libération est la vitesse minimale nécessaire pour quitter l’attraction gravitationnelle d’une planète.
L’énergie mécanique d’un objet de masse m, situé à l’extérieur d’une planète à symétrie sphérique de masse MT, est Em=21mv2−rGmMT, où r est la distance au centre de la planète.
Pour que l’objet puisse échapper à l’attraction gravitationnelle, il faut qu’il puisse se trouver à très grande distance de la planète avec une énergie cinétique définie, donc supérieure ou égale à 0, soit Em≥0.
Quand il est à la surface de la planète, en r=R, la vitesse de libération s’obtient donc par Em=21mvl2−RGmMT≥0, soit vl=R2GMT.Il s’agit ensuite de savoir l’ordre de grandeur de la vitesse qu’un humain peut atteindre en sautant à pieds joints, grâce à ses muscles.
Un volleyeur saute à environ 50 cm de haut, soit vmax≃2gh≃3 m.s−1 (en ordre de grandeur), d’où R≃ 1010 km , c’est énorme évidemment.
Exercice 13 ⭐️⭐️⭐️ Balle entre 2 murs, X MP 2018, Spé/L2
Une balle rebondit élastiquement entre deux murs verticaux dont l’un est fixe, et l’autre se rapproche de l’autre à vitesse constante à vitesse −Vux. Le poids est négligé, et la balle se déplace de façon unidimensionnelle selon l’axe (Ox) avec une vitesse bien supérieure à celle du mur. Déterminer la variation de l’énergie cinétique de la balle : on montrera que Ec1dtdEc=−ℓ2dtdℓ , où ℓ est la distance entre les murs.
Soit un puits de potentiel infini unidimensionnel de largeur ℓ qui rétrécit de la même façon que dans le 1). En raison de la faible vitesse du mur, on fait l’hypothèse que les niveaux d’énergie d’un quanton de masse m peuvent être déterminés, à une date donnée, en utilisant l’équation de Schrödinger indépendante du temps. Montrer qu’on obtient la même relation entre l’énergie de l’état fondamental et la distance qu’en 1.
Corrigé
Les positions des deux murs sont repérées par x1=0 et x2=ℓ=ℓ0−Vt dans le référentiel galiléen R du laboratoire.
Soit v la vitesse de la balle dans R, de norme v. Lors d’un rebond sur le mur fixe 1, la vitesse de la balle change de sens, son module est inchangé et l’énergie cinétique est inchangée.
Lors d’un rebond sur le mur mobile 2, on se ramène au problème précédent dans le référentiel R′ où le mur 2 est fixe et qui se déplace à VR′/R=−Vux par rapport à R :
Avant le choc, vR⌋avant=vavantux,vR⌋apreˋs=−vapreˋsux où vavant et vapreˋs sont les normes des vitesses.
vR′⌋apreˋs=−vR′⌋avant , d’où vR⌋apreˋs−VR′/R=−[vR⌋avant−VR′/R], soit vR⌋apreˋs=−vR⌋avant−2Vux, soit vapreˋs=vavant+2V.L’énergie cinétique de la balle augmente au cours du temps.
Comme V≪v, la variation de v est faible pendant la durée d’un aller-retour entre les murs τ=2ℓ/v. Ainsi
dtdv≃τ2V=ℓVv=−ℓ1dtdℓv.
Avec dtdEc=mvdtdv=2vEcdtdv,Ec1dtdEc=−ℓ2dtdℓ.
Dans le cours, on détermine les niveaux d’énergie et les fonctions d’onde des états stationnaires d’un puits infini de largeur ℓ solutions de l’équation de Schrödinger indépendante du temps
−2mℏ2dx2d2ϕ=Eϕ.
Les solutions sont indicées par n∈N∗, En=n22mℓ2ℏ2π2, et ϕn(x)=Cnsin(ℓnπx) avec ∣Cn∣=2/ℓ.
L’énergie de l’état n est En=n22mℓ2ℏ2π2.
On vérifie la relation donnant la variation de l’énergie en fonction du temps (l’énergie potentielle est nulle) pour n=1 : dtdE=−22mℓ3ℏ2π2dtdℓ, ce qui donne E1dtdE=−ℓ2dtdℓ (valable pour n quelconque).
Exercice 14 ⭐️⭐️⭐️ Frottement de glissement, Sup/L1
D’après oral CCMP MP.
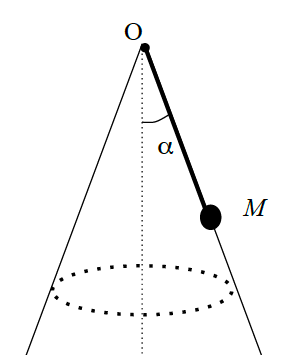
Soit un cône de sommet O, d’angle α. Un point matériel M de masse m est attaché au point O par un fil inextensible de masse négligeable et de longueur ℓ. Le fil ne frotte pas sur le cône, et le coefficient de frottement entre M et le cône est μ. On lance le point matériel avec une vitesse v0 perpendiculaire au plan contenant l’axe du cône et M. Le point décrit une trajectoire circulaire. Déterminer la date à laquelle M s’arrête.
Réflexes
Frottement de glissement 👉 Lois de Coulomb.
Corrigé
En référentiel terrestre supposé galiléen, les forces exercées sur M sont :
son poids, la réaction de composante normale au cône RN et de composante tangentielle RT, la tension du fil T. Le point glisse sur le cône : d’après les lois de Coulomb ∥∥∥∥RT∥∥∥∥=μ∥∥∥∥RN∥∥∥∥ et RT.v<0.
On utilise la base cylindrique ur,uθ,uz, l’axe (Oz) étant l’axe vertical ascendant du cône avec r=ℓsinα.
Le mouvement s’arrête pour u=0, soit t=2ω0μcosα1ln(∣∣∣∣∣∣ℓcosαg−ℓsinαv0ℓcosαg+ℓsinαv0∣∣∣∣∣∣).
Cas particulier : on voit que t→∞ quand le dénominateur du ln s’annule. En reportant dans l’expression de RN, on voit que pour cette valeur particulière de la vitesse, la réaction normale et donc aussi le frottement s’annule. Pratiquement, cela correspond à un temps très long avant l’arrêt.
Exercice 44 ⭐️⭐️⭐️ Déviation d’un neutron par un noyau, Sup/L1
On étudie l’interaction d’un neutron projectile de masse m avec un noyau fixe sphérique de rayon r0 en modélisant l’interaction forte attractive par l’énergie potentielle U(r)=−U pour 0<r<r0 U(r)=0 pour r>r0
où U>0 est une constante et r est la distance du neutron considéré ponctuel au centre du noyau. Cette énergie potentielle discontinue schématise une énergie potentielle qui varie continûment de −U à 0 sur une distance δ≪r0.
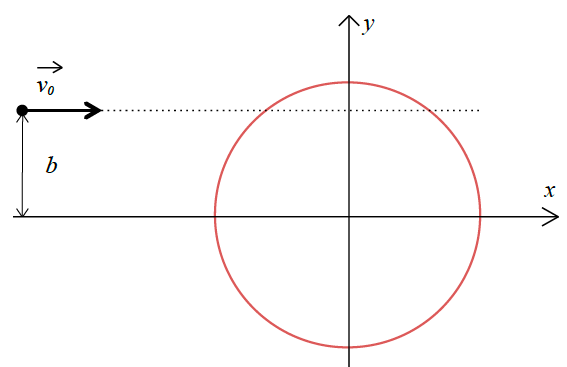
La trajectoire initiale du neutron est rectiligne uniforme de vitesse v0=v0ux et de paramètre d’impact b (voir schéma).
Montrer l’existence de deux constantes du mouvement.
Montrer que la trajectoire est formée de la réunion de parties de droite. Dans le cas où le neutron est dévié, exprimer la norme de la vitesse du neutron pour r<r0, ainsi que rm, la distance minimale d’approche au centre du noyau.
Etablir l’expression de l’angle de déviation D entre les trajectoires initiale et finale.
Réflexe
L’énergie potentielle ne dépend que de r 👉 C’est un mouvement à force centrale (La modélisation choisie conduit à une singularité de la force dont la norme devient infinie en r0).
Corrigé
L’énergie mécanique se conserve. À grande distance l’énergie potentielle est nulle. D’où Em=21mv02.
La force est centrale puisque l’énergie potentielle ne dépend que de r, donc le moment cinétique est constant L0=mvbuz.
Le mouvement est donc plan et obéit à la loi des aires. En coordonnées polaires dans le plan de la trajectoire (perpendiculaire à L0) r2θ˙=v0b.
L’énergie potentielle est constante par morceaux. La force exercée sur le neutron est nulle pour r<r0 et r>r0. La trajectoire est ainsi rectiligne uniforme dans chaque région.
Pour b>r0, la trajectoire est rectiligne et le neutron ne pénètre pas à l’intérieur du noyau.
Pour b<r0, le neutron pénètre dans le noyau. La norme de la vitesse pour r<r0 est donnée par la conservation de l’énergie mécanique Em=21mv12−U=21mv02. v1=v02+m2U. Remarque — Le cas b=r0 ne peut pas être traité dans le cadre de cette modélisation, il faudrait décrire le potentiel de manière plus réaliste.
• Pour b>r0,rm=b. La trajectoire est non déviée.
• Pour b<r0, rm s’obtient pour r˙=0. Em21mv02=21m(r˙2+r2θ˙2)+U(r)=21mr˙2+21mr2(v0b)2+U(r)=21mrm2(v0b)2−U rm=1+mv022Ub.
Cette relation s’obtient aussi par conservation du moment cinétique.
Pour b>r0, , D=0.
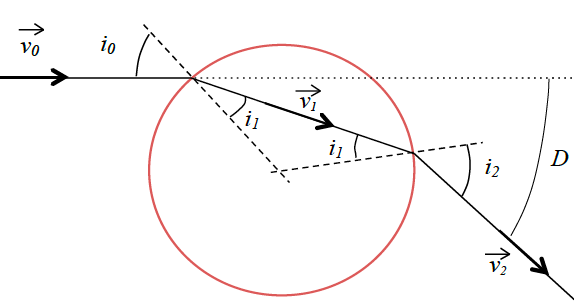
Pour b<r0, utilisons la conservation du moment cinétique OM∧mv . mv0b=mr0v0sini0=mr0v1sini1=mr0v2sini2.
Comme v0=v2 par conservation de l’énergie mécanique, i2=i0.
La déviation D=i0−i1+i2−i1=2(i0−i1), soit avec v1=v02+m2U, D=2[arcsin(b/r0)−arcsin(b/(r01+mv022U)]. Remarque — On note bien sûr l’analogie entre les relations donnant les sinus des angles i0,i1,i2 et les lois de Descartes de la réfraction, le rôle de l’indice étant joué par la vitesse.
Exercice 55 ⭐️⭐️ Voyage dans un tunnel, Spé/L2/Classique
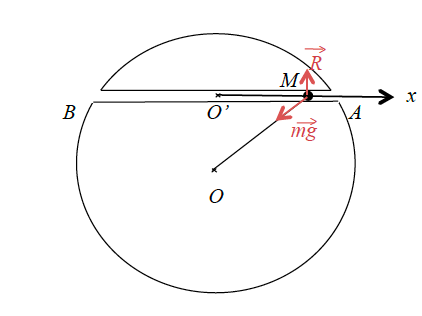
Un objet de masse m peut se déplacer sans frottement dans un tunnel rectiligne creusé à l’intérieur de la Terre et joignant deux points A et B appartenant à la surface terrestre. La Terre est supposée homogène et à symétrie sphérique, de masse totale MT, de rayon RT=6,4.106 m. Le champ de pesanteur, assimilé au champ de gravitation, a une intensité g0=9,8 m.s−2 à la surface terrestre.
Quelle est la durée du trajet reliant A à B lorsque l’objet est abandonné avec une vitesse initiale nulle en A ?
Réflexe
Champ de gravitation pour une distribution très symétrique 👉 Théorème de Gauss de la gravitation.
Corrigé
On se place dans le référentiel lié à la Terre, supposé galiléen.
Soit (x′x) l’axe du tunnel. L’objet est soumis
à l’attraction gravitationnelle P=mg
à la réaction du tunnel R normale à (x′x).
Déterminons le champ gravitationnel terrestre g(M) en un point M à l’intérieur de la Terre, en supposant que le tunnel ne perturbe pas notablement ce champ. Etant donné la symétrie du problème, on utilise les coordonnées sphériques r,θ,φ.
-Tout plan contenant le centre de masse de la Terre, O, et M est plan de symétrie de la distribution de masse ; donc g(M) est porté par l’intersection de ces plans g(M)=g(M)ur.
-Il y a invariance de la distribution de masse par rotation quelconque autour de O, donc g(M)=g(r).
-Appliquons le théorème de Gauss pour la gravitation en utilisant comme surface fermée une sphère de centre O, de rayon r<R : ∬g.d2S=−4πGMint.
avec Mint=MT(RTr)3.
∬g.d2S=∬g(r).d2S=g(r).4πr2.
D’où g(r)=−GMTRT3r.
Avec g(R)=−g0, g(M)=−g0RTrur.
L’objet est assujetti à se déplacer dans le tunnel.
Soit x sa position, l’origine O′ de l’axe étant au milieu du tunnel. Le principe fondamental de la dynamique s’écrit
ma=mg+R. En projetant sur (O′x),
mx¨=mg.ux=−mg0RTx, soit
x¨+RTg0x=0.
C’est l’équation d’un oscillateur harmonique, de pulsation ω=RTg0 et de période T=2πg0R (homogène).
Compte tenu des conditions initiales, x(t)=xAcos(ωt).
La durée du parcours de A à B(xB=−xA) est τ=T/2=πg0RT.
A.N. τ=2,5.103 s, soit 42 minutes.
Remarque — τ est indépendant de la position de A et B à la surface du globe.
Exercice 66 ⭐️⭐️⭐️ Formation d’une planète, Sup/L1
D’après X PC, oral Centrale MP.
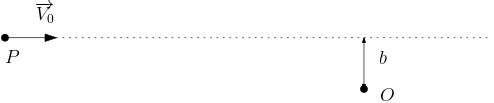
Une planète supposée ponctuelle et de masse M est immobile dans le vide à l’origine O d’un référentiel galiléen. Un point matériel P de masse m arrive de l’infini avec une vitesse initiale V0, de norme V0. On définit b=L/(mV0), où L est le moment cinétique en O de la masse m. Donner l’interprétation géométrique de b.
On note G la constante newtonienne de gravitation. On suppose m≪M, de telle sorte que la masse M reste pratiquement immobile. Quelle est la nature de la trajectoire de la masse m ? Soit rmin sa distance minimale d’approche à l’origine. Exprimer b en fonction de rmin,V0,G et M.
La planète de masse M n’est plus ponctuelle mais est assimilée à une sphère homogène de rayon R. Exprimer la vitesse de libération V1 en fonction de G,M et R. Montrer que la masse m arrivant de l’infini heurte la planète si b2<R2(1+(V0V1)2).
L’univers entourant la planète est constitué, à grande distance de celle-ci, d’un grand nombre de points matériels de masse m, répartis aléatoirement dans l’espace et ayant tous la même vitesse V0. On note n la densité volumique de points matériels (nombre par unité de volume). Exprimer le nombre moyen de points matériels heurtant la surface de la planète par unité de temps en fonction de n,V0,R,G et M.
Les points matériels heurtant la planète s’y écrasent, augmentant ainsi sa masse. On suppose également que la planète reste sphérique, de masse volumique ρ constante, de telle sorte que son rayon augmente. Donner l’expression de la vitesse d’accrétion dR/dt en fonction de n,V0,R,G,ρ et m. Analyser l’évolution de R pour V0≪V1 puis V0≫V1. Expliquer pourquoi on parle, pour ce processus, de focalisation gravitationnelle ainsi que d’accrétion galopante.
Réflexe
Force centrale conservative 👉 L’énergie mécanique et le moment cinétique par rapport au centre sont des constantes du mouvement.
Force newtonienne 👉 La trajectoire est une conique dont la nature dépend de l’énergie mécanique.
Corrigé
b est le paramètre d’impact : c’est la distance de O à la droite passant par le point matériel P à grande distance de O et parallèle à la vitesse V0. Ainsi le moment cinétique de P par rapport à O a pour norme L=∥∥∥∥OP∞∧mV0∥∥∥∥=mbV0.
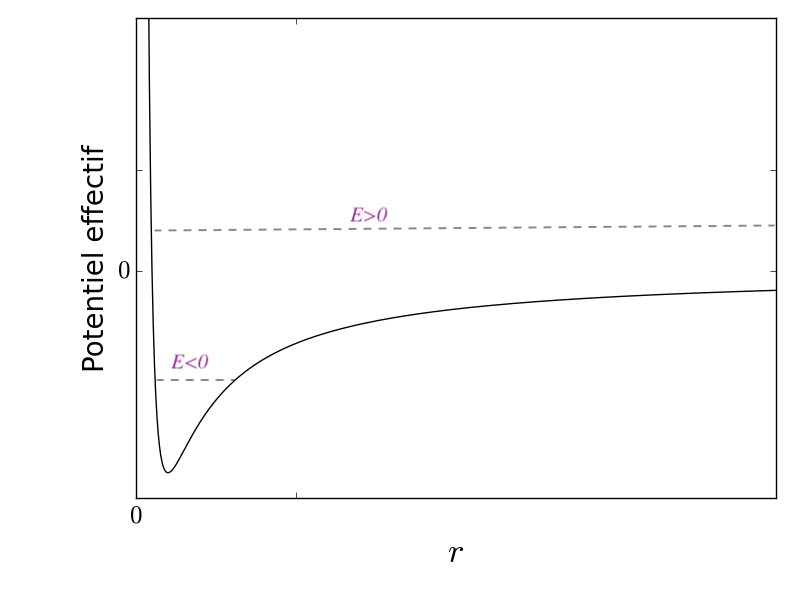
La force étant centrale, le mouvement du point matériel est plan. Pour une force newtonienne attractive, le cours montre que la trajectoire est une conique dont la nature dépend de la valeur de l’énergie mécanique, qui se conserve. L’énergie potentielle, Ep=−GrmM, tendant vers 0 à grande distance,
-pour Em>0, la trajectoire est hyperbolique
-pour Em=0, la trajectoire est parabolique
-pour Em<0, la trajectoire est elliptique ou circulaire.
Le point matériel est initialement à grande distance, et son énergie mécanique Em=Ec+Ep=21mV02>0, la trajectoire est hyperbolique.
Dans le plan de la trajectoire, utilisons les coordonnées polaires : Ec=21m[r˙2+r2θ˙2]=21mr˙2+2mr2L2.
D’où Em=21mr˙2+2mr2L2−GrmM.
Pour la distance minimale d’approche r˙=0, d’où 2mr2L2−GrmM=21mV02. En multipliant par r2, on obtient une équation du second degré en r, et seule la racine positive est à retenir. D’où (on vérifie l’homogénéité)rmin=−V02GM+V04G2M2+m2V02L2. L=mV0b, d’où rmin=−V02GM+V04G2M2+b2, soit b2=−V04G2M2+(rmin+V02GM)2=rmin2+2rminV02GM. b=rmin2+2rminV02GM.
La vitesse de libération est celle qui permet à un objet situé à la surface de la planète d’échapper à son attraction gravitationnelle. L’énergie mécanique de l’objet de masse μ est Em=21μV12−GRμM. Si cet objet peut partir à grande distance, alors son énergie mécanique est égale à grande distance à son énergie cinétique, elle est donc positive. D’où la valeur limite Em=21μV12−GRμM=0, soit V1=R2GM.
La masse m heurte la planète lorsque rmin≤R, soit −V02GM+V04G2M2+m2V02L2≤R ⇒−2R(V0V1)2+(2R)2(V0V1)4+b2≤R ⇒(2R)2(V0V1)4+b2≤(R+2R(V0V1)2)2, ce qui donne bien b2<bmax2=R2(1+(V0V1)2).
Les points de paramètre d’impact inférieurs à bmax heurtent la planète. Ainsi les points se trouvant à grande distance de la planète dans un cylindre de section πbmax2 heurteront la planète. Le nombre de points qui vont traverser une section du cylindre pendant dt est nV0dtπbmax2. Ainsi, le nombre de points heurtant la planète par unité de temps est (homogène) N=nV0πbmax2. Remarque — Tous les points qui se trouvaient sur une section du cylindre ne le heurteront pas à la même date, mais en régime “permanent”, le temps de parcours associé à une trajectoire particulière ne varie pas, ce qui permet d’obtenir le résultat ci-dessus.
dtdM=Nm=mnV0πbmax2 ⇒4πR2dtdRρ=mnV0πR2(1+(V0V1)2), d’où dtdR=4ρmnV0(1+(V0V1)2).
Avec V1=R2GM,dtdR=4ρmnV0(1+3V028GρπR2)
Pour V0≪V1,dtdR≃4ρV0mnV12=4ρV0Rmn2GM=3V0mn2GπR2
Pour V0≫V1,dtdR≃4ρmnV0.
Le terme de focalisation gravitationnelle est justifié par la courbure des trajectoires, initialement rectilignes, par l’attraction de la planète, qui est foyer de l’hyperbole trajectoire. La trajectoire des objets est déviée vers la planète.
En raison de l’accrétion, le rayon de la planète augmente. Il arrive donc un moment, pour un flux de particules de vitesse V0 donnée, où V0<V1=38GρπR2. Le terme d’accrétion galopante se justifie par le fait que la masse (et donc aussi le rayon) de la planète augmente au cours du temps, et d’autant plus que le rayon de la planète est grand, comme le montre l’expression de dtdR dans le cas V0≪V1.
Exercice 67 ⭐️⭐️ Barre avec ressort spiral, Sup/L1
Dans le référentiel terrestre galiléen, une tige AB de longueur L, de masse négligeable, peut tourner sans frottement autour d’un axe horizontal (Bx) et reste dans le plan vertical (B,y,z) en faisant un angle θ avec la verticale ascendante (Bz). En B, un ressort spiral exerçe un couple de rappel de moment C=−kθ(t)ux. Une masse quasi ponctuelle m est fixée en A.
Déterminer l’équation vérifiée par θ(t).
Dans l’hypothèse où θ est petit, discuter de la forme des solutions.
Quelle est l’énergie potentielle associée à l’action du ressort ? En déduire l’énergie potentielle totale.
Quelles sont les positions d’équilibre?
Dans le cas où il y a 3 solutions, on appelle θ1 l’une d’entre elles , θ2 et −θ2 les deux autres. Montrer que θ2sin(θ2)=mLgk.
En utilisant le tracé de la fonction xsin(x), trouver une condition sur k pour que θ2 existe.
Discuter de la stabilité des positions d’équilibre.
Réflexes
Positions d’équilibre 👉 Les positions d’équilibre stables (resp. instables) correspondent aux minima (resp. maxima) de l’énergie potentielle.
Corrigé
Le système étudié est l’ensemble formé par la tige et la masse m. Les actions exercées sont
le poids en A
la réaction d’axe en B
Le couple de rappel.
Le théorème du moment cinétique scalaire appliqué au système et projeté sur (Bx) donne :
mL2θ¨=−Cθ+mLgsinθ.
Pour θ petit , mL2θ¨=(−C+mLg)θ.
Pour C>mLg, c’est un oscillateur harmonique de pulsation ω=C−mLg. θ(t)=Acos(ωt)+Bsin(ωt).θ=0 est une position d’équilibre stable
Pour C<mLg, θ(t)=Cexp(−t/τ)+Dexp(t/τ) avec τ=1/mLg−C (ou on peut choisir une solution en cosh et sinh). θ=0 est une position d’équilibre instable
Pour C=mLg, θ(t)=Et+F.θ=0 est une position d’équilibre instable.
dEp=−C.dθux=d(21kθ2), Ep=21kθ2 à une constante près.
Ep,tot=21kθ2+mgLcosθ.
Les positions d’équilibre vérifient Ep,tot′=0⟺kθ=mgLsinθ.
Soit θ=θ1=0, soit θ=±θ2 avec θ2sin(θ2)=mLgk. Pour que ces dernières solutions existent il est nécessaire que mLgk<1, qui est la valeur maximale atteinte par xsin(x).
Ep,tot′=kθ−mgLsinθ et E"p,tot=k−mgLcosθ.
Pour mLgk≥1, seule la position d’équilibre θ1=0 existe et elle est stable car E"p,tot(0)>0.
Pour mLgk<1, la solution θ1=0 existe est instable car E"p,tot(0)<0. E"p,tot(θ)=0 pour θ=θ3 tel que k=mgLcosθ3. En traçant y1=cosθ et y2=sin(θ)/θ, il apparait que θ2>θ3 et donc E"p,tot(±θ2)>0. Les positions d’équilibre ±θ2 sont stables.
Exercice 84 ⭐️⭐️ Cône Tcherenkov, Sup/L1
D’après X PC 2019
Une particule chargée est en mouvement rectiligne uniforme à la
vitesse v . Elle émet en chaque point de sa trajectoire une onde sphérique se propageant à la vitesse u, qu’on suppose constante. Montrez que
si v>u, les points de l’espace atteints par l’onde occupent l’intérieur
d’un cône dont vous préciserez l’axe et le demi-angle au sommet, et que vous représenterez sur un schéma.
Dans les détecteurs de neutrinos comme Super-Kamiokande au Japon,
les neutrinos sont détectés quand ils rentrent en collision avec des molécules d’eau. Un électron, de vitesse v voisine de c, est alors éjecté et émet un rayonnement électromagnétique (rayonnement Tcherenkov). L’indice de l’eau est n=1,33. Quel est l’angle entre la direction de l’électron et le rayonnement Tcherenkov ?
Corrigé
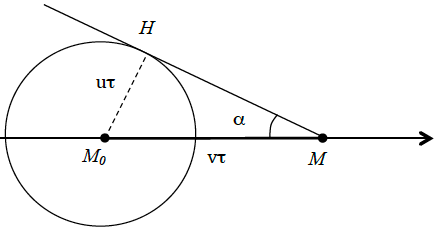
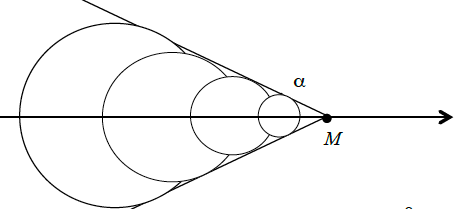
Soit M la position de la particule à la date t. L’onde émiseà t−τ depuis la position M0 telle que M0M=vτ, atteint à t la sphère de rayon uτ centrée sur M0. Cette onde se trouve ainsi à t à l’intérieur d’un cône d’angle α tel que sinα=M0MM0H=vτuτ, indépendant de τ.
Ainsi, les points de l’espace atteints par l’onde occupent l’intérieur d’un cône dont l’axe est donné par la trajectoire de la particule, et de demi-angle au sommet α=arcsinvu.
Ici v=c et u=c/n. D’où sinα=n1 .α=49∘.
Remarque — Un autre exemple est le cône de Mach observé dans le cas
d’un avion supersonique.
Exercice 85 ⭐️⭐️⭐️ Sillage d’un canard, Sup/L1
Un canard se déplace rectilignement sur un lac à la vitesse uniforme V=Vex. Son passage provoque l’émission d’ondes, sous forme de vaguelettes, à la surface de l’eau dans toutes les directions.
Pour une onde se propageant dans la direction qui fait un angle θ avec la direction de déplacement du canard, l’énergie de l’onde, dont dépend le sillage, se déplace à la vitesse U=2Vcos(θ).
En déduire l’angle du sillage d’un canard. Qu’en est-il d’un paquebot ?
Remarque pour les curieux (niveau Spé) — La vitesse de propagation d’une onde de longueur d’onde donnée ne dépend pas de la direction d’émission, mais selon l’analyse de Kelvin, seules sont observées les ondes stationnaires de longueur d’onde telle que la vitesse de l’eau dans le référentiel du bateau projetée sur la direction de propagation de l’onde s’oppose exactement à la vitesse de phase Vφ de l’onde, soit Vφ=Vcos(θ). Avec la relation U=Vg=21Vϕ valable pour les ondes de surface en eau profonde, on obtient la relation donnée.
Rappel — L’équation en coordonnées polaires d’un cercle de diamètre a, passant par l’origine et par le point situé sur l’axe polaire d’abscisse x=a est r=acosθ.
Indice
Représenter sur un schéma la position du canard à la date t, la position du canard à la date t′, et le lieu des points atteints à la date t par l’onde émise par le canard à la date t′.
Corrigé
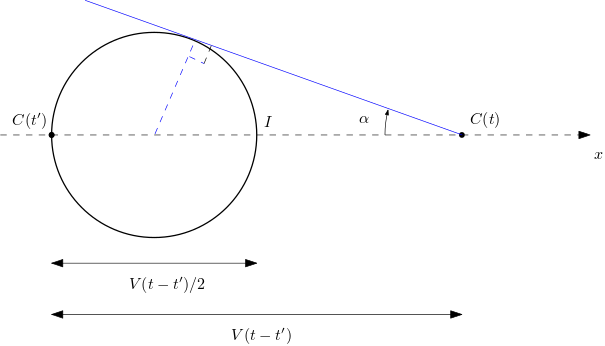
L’onde émise à t’ dans la direction θ a parcouru à la date t la distance U(t−t′)=2Vcos(θ)(t−t′)=acos(θ). Le lieu des points atteints par l’onde est donc le cercle de diamètre a=2V(t−t′).
Ce cercle passe par le milieu I des positions C(t) et C(t′) du canard à t et t′. Les points du cercle sont tous contenus dans le cône de sommet C(t) et d’angle α, tel que
tan(α)=3a/2a/2=31, indépendant de t et t′.
On peut remarquer que toutes les ondes sont émises vers l’avant dans le référentiel terrestre : pour π/2<∣θ∣≤π,V<0. Par exemple, pour une émission dans la direction θ=π,V=−2U, d’où V=2Uex.
Ainsi à la date t, toutes les vaguelettes créées par le passage du canard sont comprises dans un cône d’angle 2α=39°, qui définit le sillage du canard.
La résolution est identique pour les paquebots !
Remarques
— Il est intéressant de comparer ce résultat à celui de l’exercice 84, en milieu non dispersif, sur le cône Tcherenkov, ou cône de Mach, dans lequel l’angle du “sillage” est 2α=2arcsinvu.
— La relation donnant la vitesse des ondes doit être modifiée quand V augmente ; le sillage d’un bateau rapide de type « cigarette » est plus étroit.
Pour les curieux, un bel article de “Reflets de la physique” sur le sujet se trouve ici.
Exercice 93 ⭐️⭐️⭐️ Un exemple de trajectoire, ENS MP 2019, Sup/L1
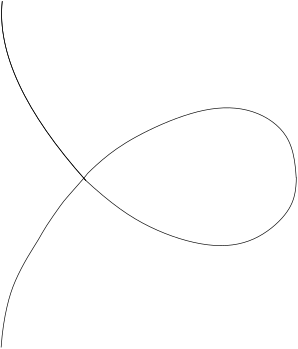
Une particule ponctuelle est soumise à une force centrale conservative de centre O. L’allure de sa trajectoire est reproduite ci-dessous. Que peut-on en déduire sur la position de O et la nature de l’interaction ?
Corrigé
Propriétés générales
La force est conservative, donc l’énergie mécanique Em=21mv2+Ep se conserve.
La force est centrale, donc le moment cinétique σ0 de la particule M se conserve et la trajectoire est plane (plan contenant le centre de force O et perpendiculaire à σ0 ) en conformité avec la trajectoire de l’énoncé, et vérifie la loi des aires. En coordonnées cylindriques (coordonnées polaires dans le plan de la trajectoire), f(M)=f(M)er=−gradEp,
donc f=−drdEp,dθdEp=0,dzdEp=0, f(M) ne dépend donc que de r.
f(M)=f(r)er
σ0=mrvθez=mr2θ˙ez
Em=21mr˙2+2mr2σ02+Ep(r).
Remarque — σ0 peut s’exprimer en fonction de la vitesse à l’infini V∞ et du paramètre d’impact b , distance entre le centre de force O et la droite passant par la position du point M à très grande distance, et de direction V∞, σ0=mV∞b.
Position du centre de force
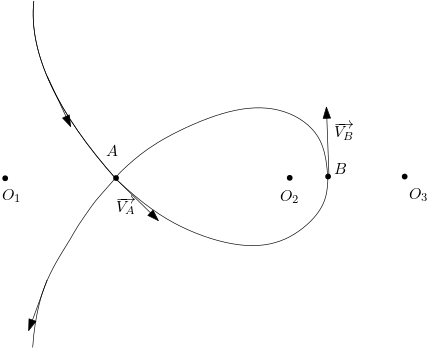
La particule démarre à très grande distance (à “l’infini”), et repart à l’infini. Il y a donc une distance minimale d’approche rmin. Au point M tel que r=rmin, la vitesse v=r˙ur+rθ˙uθ=rθ˙uθ est perpendiculaire à ur. Par ailleurs, le potentiel ne dépendant que de r, si en M on changeait le sens de la vitesse, on aurait la même trajectoire, symétrique par rapport à (OM). La trajectoire totale doit donc être symétrique par rapport à (OM). Le centre de force O est donc sur l’axe de symétrie de la trajectoire, et le point M de plus courte approche est nécessairement le seul dont la tangente (qui porte la vitesse) est perpendiculaire à (OM) (point B sur la figure).
Choisissons arbitrairement un sens de parcours. Supposons O à l’extérieur
de la boucle (position O1 ou O3). Alors OiA∧mVA et OiB∧mVB sont de sens contraire.
Ces positions ne peuvent donc pas convenir pour un moment cinétique constant. Le centre de force est nécessairement à l’intérieur de la boucle.
À grande distance, la particule se rapproche de O ; elle passe un certain temps à proximité de O, puis s’en éloigne.
-Soit il y a une distance extrêmale d’approche (minimale), alors elle est nécessairement sur l’axe de symétrie, en B car la vitesse est orthoradiale en ce point.
-Soit il y en davantage : au vu du graphique il peut y avoir 3 distances extrémales, en B (où il y aurait une distance maximale relative) et en deux points symétriques par rapport à l’axe (AB). Mais dans ce cas, ces deux points seraient franchis avec des vitesses de normes identiques par conservation de Em, de directions parallèles à l’axe de symétrie, et devraient donc donner lieu à des trajectoires analogues à partir de ces deux points, ce qui n’est pas le cas. Cette situation n’est pas possible.
Il y a donc une seule distance minimale d’approche en B, où la vitesse (égale à la vitesse orthoradiale) est maximale d’après la conservation de l’énergie mécanique. Le centre de force est à l’intérieur de la boucle, à proximité de B.
Nature de l’interaction
La force est attractive, comme on peut le vérifier en écrivant le principe fondamental de la dynamique dans la base de Frénet m[RV2n+V˙t]=f, le vecteur n, unitaire, étant dirigé vers le centre de courbure de la trajectoire au point M, et R est le rayon de courbure en ce point.
Avec f=−drdEp<0, l’énergie potentielle est une fonction croissante de r (mais pas en −r1 sinon la trajectoire serait une conique). Ep est définie à une constante près. Choisissons Ep(r)→0 quand r→∞. Alors Em=21mV∞2≥0. rB étant la distance minimale d’approche, {Em=2mrb2σ02+Ep(rb)Em>2mr2σ02+Ep(r)pour r>rB.
On obtient ainsi que ⎩⎪⎨⎪⎧Ep(r)<21mV∞2(1−r2b2)Ep(rB)=21mV∞2(1−rB2b2).pour tout r>rB,
On peut utiliser la nature attractive de l’interaction pour préciser la position du centre de force.
Exprimons l’accélération en B : dans la base de Frénet a=RV2n où R est le rayon de courbure en B. Par ailleurs, a=(r¨−rθ˙2)er=(r¨−rV2)er. On obtient n=−er, et puisque rB est la distance minimale, r˙<0 avant d’arriver à B et r˙>0 après B, alors r¨≥0 en B.
RV2=−r¨+rV2⟹R≥r. Donc le centre de force est entre le centre de courbure de la trajectoire en B (centre du cercle osculateur) et le point B lui-même.
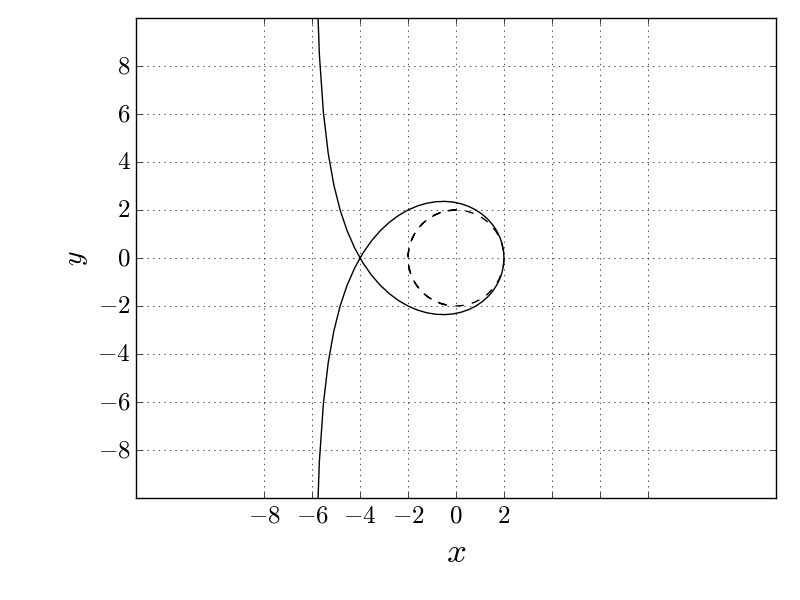
Remarque — Une trajectoire de ce type peut être obtenue avec une interaction Ep=−k/r2 ouˋk>0. En utilisant la formule de Binet (hors programme sup et spé) donnant l’accélération en fonction de u=1/r étudiée comme fonction de θ (i.e.u′=dθdu), et de C=σ0/m, ma=−C2u2(u"+u)er=−2ku3er,
soit u"+(1−C22k)u=0.Dans le cas où λ2=1−C22k>0, la solution est r=cos[λ(θ−θ0)]r0.
La représentation graphique de cet “épi” est donnée ci-dessous pour r0=2,λ=1/3,θ0=0 pour θ variant de −3π/2 à 3π/2.
Exercice 98 ⭐️⭐️ Paradoxe de Braess, Sup/L1
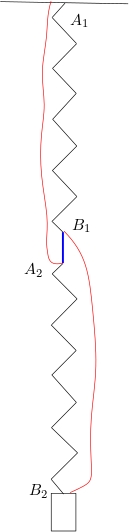
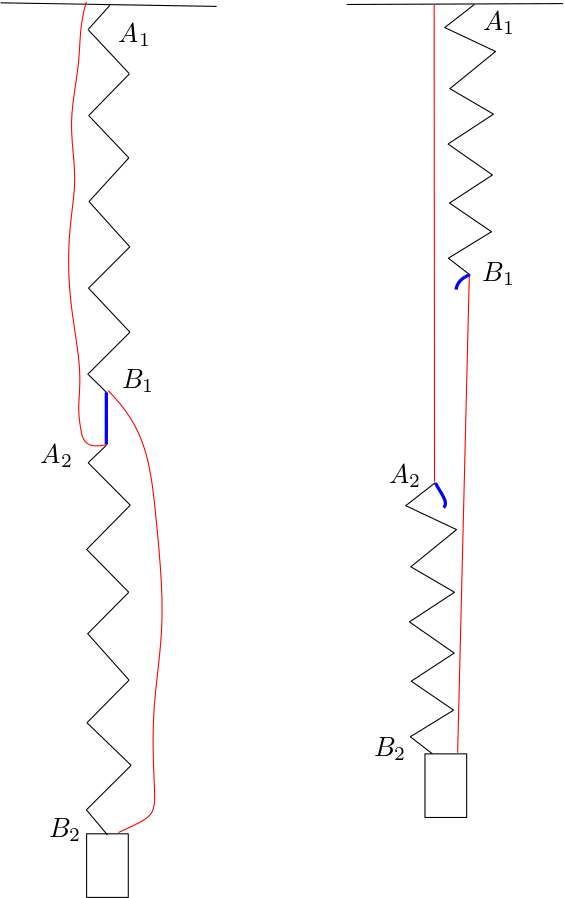
Deux ressorts identiques 1 et 2 montés en série sont reliés par un petit fil inélastique (bleu sur la figure) par leurs extrémités B1 et A2. L’extrémité A1 du premier ressort est accrochée au plafond. Une masse est suspendue, en équilibre, à l’extrémité B2 du second ressort.
Deux fils inélastiques (rouges sur la figure), identiques, de masse négligeable, et de longueur légèrement supérieure à la longueur des ressorts tendus par la masse, sont attachés entre A1 et A2 pour l’un, entre B1 et B2 pour l’autre. On coupe le petit fil bleu. Que se passe-t-il ?
Corrigé
Qualitativement
Dans la situation initiale, la masse est en équilibre sous l’action de son poids et de la tension exercée par le ressort en B2. Cette tension est transmise via le fil bleu au ressort 1. Ainsi les deux ressorts sont allongés d’une même longueur, la tension de chacun étant égale au poids de la masse. La longueur totale est la somme des longueurs des deux ressorts (à la longueur du petit fil bleu près).
Dans la seconde situation, la masse est en équilibre sous l’action de son poids, de la tension en B2, et de la tension du fil inélastique 1, qui transmet au ressort 1 cette tension, qui est donc égale à la tension en B1. La somme des deux tensions en B1. et B2 est donc égale en norme au poids de la masse. Ainsi les deux ressorts sont allongés d’une même longueur, la tension de chacun étant égale à la moitié du poids de la masse. La longueur totale est la somme de la longueur d’un ressort dans la seconde situation et de la longueur d’un fil inélastique, elle-même quasiment égale à la longueur d’un ressort dans la première situation.
La longueur totale dans la seconde situation est donc inférieure à celle de la situation initiale.
Avec des équations
Situation initiale
Equilibre de la masse P+TB2=0.
Les tensions aux deux extrémités d’un ressort sont opposées TA2+TB2=0.
Equilibre du petit fil bleu −TB1−TA2=0.
Donc TB1=TB2=−P.
La longueur l1 des deux ressorts vérifie k(l1−l0)=P.
La longueur totale (hormis celle du petit fil noir) est L1=2(l0+P/k).
Situation finale
A l’équilibre, les tensions aux deux extrémités d’un fil inélastique
tendu sont opposées. D’après la loi des actions réciproques, la masse
est donc soumise de la part du fil inélastique 1 à la tension TB1.
Equilibre de la masse P+TB2+TB1=0
.
Les longueurs des deux ressorts sont identiques à l’équilibre. La
longueur l2 des deux ressorts vérifie 2k(l2−l0)=P.
Soit l′=l1+ε la longueur des fils inélastiques
La longueur totale (hormis celle du petit fil bleu) est L2=l′+l0+2kP=2l0+ε+kP+2kP=2l0+ε+2k3P.
Pour ε<2kP=2l1−l0, ce qui est le cas a priori (hypothèse de longueur du fil inélastique très légèrement supérieure à celle du ressort), L2<L1.
Une mise en oeuvre de cette expérience se trouve sur l’excellente
chaîne youtube de Jean-Michel Courty.
Cette situation est l’analogue mécanique du paradoxe de Braess en théorie des réseaux de transport, qui montre qu’ajouter une nouvelle route (le fil bleu du problème mécanique) dans un réseau routier peut conduire à une augmentation du temps total de parcours pour chaque véhicule. À voir sur le sujet : les dix premières minutes de la video de Sciences4All.
La longueur totale du dispositif mécanique est l’analogue du temps total de parcours, le ressort est l’analogue d’une petite route dont le temps de parcours est proportionnel au nombre de voitures l’empruntant, le fil inélastique est l’analogue d’une autoroute de temps de parcours indépendant du nombre de véhicules présents.
Exercice 121 ⭐️⭐️⭐️ Une molécule polarisable, Spé/L2
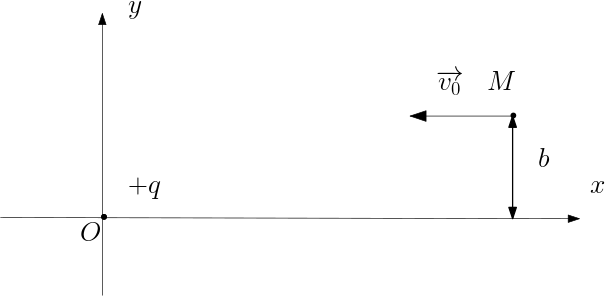
Une molécule polarisable est assimilée à un point matériel M de masse m. Lorsqu’elle est soumise à un champ électrique, elle acquiert instantanément un moment dipolaire électrique p=αε0E(M), où α est une constante positive appelée polarisabilité de la molécule.
La molécule arrive depuis “l’infini” avec une vitesse v0 sur un ion de charge q fixe situé à l’origine des coordonnées. Le paramètre d’impact (voir schéma) est b.
Etudier le mouvement de la particule.
Réflexe
Force exercée sur un dipôle 👉 Dans un champ extérieur uniforme, la force résultante est nulle. Dans un champ non uniforme, la force résultante F=(p.grad)E se retrouve en sommant les forces s’exerçant sur les deux charges du dipôle.
Corrigé
Pour retrouver la force exercée par l’ion sur le dipôle, on écrit la somme des deux forces coulombiennes qui s’exercent sur les deux charges Q et −Q constituant le dipôle, placées en A+ et A−. F=QE(A+)−QE(A−).
Pour la composante selon (Ox) : Fx=Q[Ex(A+)−Ex(A−)]=Q[(xA+−xA−)∂x∂Ex+(yA+−yA−)∂y∂Ex+(zA+−zA−)∂z∂Ex]=Q[(xA+−xA−)∂x∂+(yA+−yA−)∂y∂+(zA+−zA−)∂z∂]Ex=(p.grad)Ex,
où p=QA−A+.
En faisant la même chose pour les autres axes, on obtient F=(p.grad)E.
Le champ créé par l’ion E(M)=4πε0r2qur=E(r)ur, avec ur=OMOM .
Donc p=αε0E(r)ur et p.grad=αε0E(r)drd
D’où F=αε0E(r)drdEur=−drd(−21αε0E2(r))ur.
Il s’agit d’une force centrale qui dérive d’une énergie potentielle Ep=−21αε0E2(r).
Il y a conservation de l’énergie mécanique Em. Les conditions initiales fournissent Em=21mv02.
La force étant centrale, il y a conservation du moment cinétique par rapport à O, L0=OM∧mv=mv0bez. La trajectoire est plane, dans le plan passant par O et perpendiculaire à L0 .
Avec les coordonnées polaires dans ce plan, l’énergie mécanique est Em=21mv2+Ep=21m(r˙2+r2θ˙2)+Ep=21mr˙2+2mr2L02+Ep(r)=21mr˙2+Veff(r).
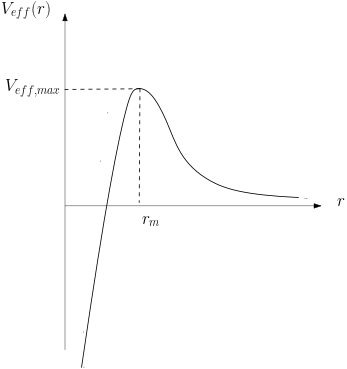
On se ramène ainsi à un problème unidimensionnel radial où le point se déplace dans le potentiel effectif Veff(r)=2mr2L02−r4K, où K=αε0(4πε0q)2.
En dérivant, Veff,max est obtenu pour rm=L04Km. Veff,max=16Km2L04=16Km2b4v04.
-Pour Em>Veffmax, soit v0≤b48K/m, le dipôle s’écrase sur l’ion, il y a choc.
-Pour Em<Veffmax, le dipôle rebondit sur le mur de potentiel et fait demi-tour. La molécule a dans ce cas une énergie cinétique initiale suffisante pour échapper à l’attraction de l’ion.
-Pour Em=Veffmax, la molécule peut atteindre la valeur r=rm correspondant sur le graphe à une position d’équilibre instable en r, c’est-à-dire une trajectoire circulaire instable de la molécule.
Exercice 134 ⭐️ Rayon de Schwarzshild d’un trou noir, Sup/L1/Classique
Le rayon de Schwarzshild RS d’un trou noir est la distance au centre du trou noir pour laquelle la vitesse de libération est égale à c.
Déterminer le rayon de Schwarzshild d’un trou noir de masse égale à la masse de la Terre MT=6.1024 kg.
Rappel : la vitesse de libération est la vitesse minimale d’un objet lui permettant d’échapper à l’attraction gravitationnelle d’un astre.
On donne la constante de gravitation universelle G=6,67.10−11m3.kg−1.s−2.
Corrigé
L’énergie mécanique d’un objet de masse m, de vitesse v soumis à l’attraction gravitationnelle d’un astre à symétrie sphérique de masse M et se trouvant à la distance r du centre de l’astre, à l’extérieur de celui-ci est Em=Ec+Ep=21mv2−GrmM.
Pour un objet situé à très grande distance de l’astre Em≃Ec=21mv∞2≥0.
Par conservation de l’énergie mécanique, il faut donc que 21mv2−GrmM≥0 pour que l’objet situé à la distance r puisse échapper au champ gravitationnel de l’astre.
On en déduit la vitesse de libération à la distance r, vℓ=r2GM.
Pour un trou noir de masse MT, le rayon de Schwarzshild vérifie donc c=RS2GMT, soit RS=c22GMT.
A.N. : RS=9 mm, ce qui est vraiment très petit !
Exercice 136 ⭐️⭐️⭐️ Mouvement d’une bille sur un support, Sup/L1
Une bille est astreinte à se déplacer sans frottement sur une surface d’équation z=−rk , en coordonnées cylindriques, où (z) est l’axe vertical ascendant et k>0.
Rappeler l’expression de la vitesse v et de l’accélération a en coordonnées cylindriques et montrer que a.eθ=r1dtd(r2θ˙).
Justifier que la composante orthoradiale de la réaction R est nulle.
Quelles sont les forces en présence ? Dérivent-elles d’une énergie potentielle?
Démontrer que l’énergie mécanique de la bille se met sous la forme E=21mα(r)r˙2+21mr2C2−rmgk.
où C est une constante, et préciser α(r).
Tracer l’énergie potentielle effective Ep,eff=21mr2C2−rmgk en fonction de r et discuter les valeurs possibles pour r en fonction de l’énergie mécanique initiale.
Quelle doit être la vitesse initiale (direction, norme) pour avoir un mouvement circulaire?
Réflexe
Energie mécanique et forces non conservatives 👉 ΔEm=Wforces non conservatives. Quand le travail des forces non conservatives est nul, l’énergie mécanique est une constante du mouvement.
Corrigé
v=r˙er+rθ˙eθ+z˙ez. a=(r¨−rθ˙2)er+(rθ¨+2r˙θ˙)eθ+z¨ez. a.eθ=rθ¨+2r˙θ˙.
Or dtd(r2θ˙)=r2θ¨+2rr˙θ˙, ce qui donne le résultat demandé.
La bille se déplace sans frottement, la réaction est donc normale au support. Elle est dans le plan (er,ez), et normale à la courbe z=−rk .
Dans le référentiel terrestre supposé galiléen, la bille est soumise
-à son poids, qui dérive de l’énergie potentielle Ep1=mgz=−mgrk(à une constante près),
-à la réaction normale au support. Le travail de la réaction est nul, mais on ne peut pas définir une énergie potentielle associée telle que dEp=−δW et R=−gradEp.
L’énergie cinétique de la bille est Ec=21mv2=21m(r˙2+r2θ˙2+z˙2).
Aucune des forces n’a de composante sur eθ, donc avec la seconde loi de Newton projetée sur eθ, ma.eθ=0 ce qui implique d’après 1) dtd(r2θ˙)=0, soit r2θ˙=C constante, d’où r2θ˙2=r2C2.
Par ailleurs z=−rk⟹z˙=kr2r˙. D’où Ec=21mv2=21m(r˙2+r2C2+k2r4r˙2)=21m(1+r4k2)r˙2+21mr2C2.
D’où E=Ec+Ep1=21mα(r)r˙2+21mr2C2−rmgk
avec α(r)=1+r4k2.
Ep,eff′=r2m(−rC2+gk) s’annule pour r=rm=gkC2, qui correspond au minimum Emin=−m2C2g2k2 de Ep,eff. 21mα(r)r˙2≥0⇒E≥Ep,eff(r), ce qui définit l’intervalle des valeurs possibles de r.
-Pour Emin<E<0, r reste borné et oscille entre les deux valeurs extrêmes de r, pour lesquelles Ep,eff(r)=E.
-Pour E≥0, r varie entre sa valeur minimale, telle que Ep,eff(r)=E et +∞.
Un mouvement circulaire correspond à une seule valeur de r accessible.
C’est le cas lorsque E=Emin, avecr=rm. E=Em=21mv2−rmmgk⟺−m2C2g2k2=21mv2−mC2g2k2⟺v=vm=Cgk.
Cela correspond bien à une vitesse orthoradiale, tangente à la trajectoire, vm=rmθ˙=rmC=Cgk.
En éliminant C dans les expressions de vm et rm, vm=rmgk.
Pour obtenir une trajectoire circulaire de rayon rm, la bille doit être lancée à la distance rm de l’axe, avec une vitesse orthoradiale vm=rmgk.
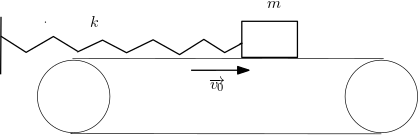
Une masse m est posée sur un tapis roulant se déplaçant à la vitesse horizontale v0=v0ex,v0>0 dans le référentiel du laboratoire R.
La masse est soumise à une force de rappel colinéaire au mouvement du tapis, exercée par un ressort de raideur k. Les coefficients de frottement statique et cinétique entre la masse et le tapis sont fs et fc avec fs=2fc. La position de la masse est repérée par son abscisse x dans R, avec x=0 en l’absence de déformation du ressort.
Déterminer la position d’équilibre xeq en fonction de fc,g et ω2=k/m.
Expliciter le mouvement de la masse dans les deux cas x˙>v0 et x˙>v0.
Montrer qu’une phase de collage (x˙=v0) peut se maintenir lorsque x appartient à un intervalle [x1,x2] à déterminer.
La masse est posée sur le tapis avec une vitesse initiale nulle à l’abscisse x0>xeq. Déterminer x(t) pour le début du mouvement. Montrer que ce type de mouvement se maintient si x0 est inférieur à une valeur xm à déterminer.
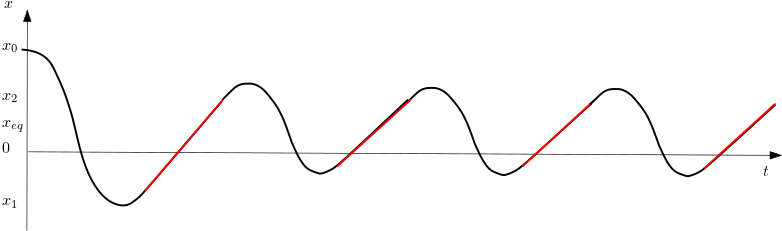
Cas particulier : xeq=2ωv0, x(t=0)=x0=4xeq et x˙(t=0)=0. Représenter l’allure de x(t).
Réflexes
Frottement solide 👉 Lois de Coulomb
Corrigé
Les forces exercées sur la masse dans R galiléen sont
le poids mg
la tension du ressort F=−kxex
l’action du tapis R=Nez+Tex.
À l’équilibre, mg+F+R=0
soit {−mg+N=0−kx+T=0.
À l’équilibre dans R, la masse glisse sur le tapis, et la vitesse de glissement est vg=−v0. D’après les lois de Coulomb, la réaction tangentielle est de sens opposé à vg, d’où T=fcN=fcmg, et xeq=kfcmg=ω2fcg.
Le résultat (homogène) montre comme attendu que le ressort est étiré, le tapis entraîne la masse.
Le bilan des forces est le même qu’en 1., ce qui donne {−mg+N=0mx¨=−kx+T.
La vitesse de glissement est vg=x˙ex−v0.
Pour x˙>v0, T=−fcmg et mx¨=−kx−fcmg,
soit x¨+ω2x=−ω2xeq.
Tant que x˙>v0, x(t)=−xeq+Acos(ωt)+Bsin(ωt), avec A,B constantes.
Pour x˙<v0, T=fcmg et mx¨=−kx+fcmg,
soit x¨+ω2x=ω2xeq.
Tant que x˙<v0, x(t)=xeq+Ccos(ωt)+Dsin(ωt), avec C,D constantes.
Lorqu’il y a collage, x˙=v0, donc x¨=0 et ∣T∣≤fsmg.
L’équation du mouvement donne T=kx. Il faut donc ∣x∣≤kfsmg, soit x appartenant à l’intervalle [x1=−kfsmg,x2=kfsmg]. Ainsi, lorsqu’au cours du mouvement, la masse a une vitesse v0 et se trouve dans l’intervalle [x1=−2xeq,x2=2xeq], une phase de collage commence, x augmente à la vitesse v0, puis la phase de collage se termine pour x=x2.
Initialement x˙<v0, d’où avec les conditions initiales x(t)=xeq+(x0−xeq)cos(ωt). x˙(t)=−ω(x0−xeq)sin(ωt).
L’équation du mouvement reste inchangée si pour tout t, x˙<v0,
soit x0<xm=xeq+ωv0.
Pour x0≥xm, la première phase du mouvement s’arrête pour
la première date t1 telle que v=v0, soit sin(ωt1)=−ω(x0−xeq)v0.
Au début du mouvement x(t)=2ωv0(1+3cos(ωt)), x˙(t)=−23v0sin(ωt).
Pour t1 telle que sin(ωt1)=−32, x˙=v0 et x(t1)=2ωv0⎝⎛1−31−(32)2⎠⎞=2ωv0(1−5).
Une phase de collage commence à vitesse v0 jusqu’à t2 tel que ce que x(t2)=x2=ωv0.
À t=t2+, la réaction tangentielle diminue en module. La masse
est freinée et x˙<v0, d’où x(t)=2ωv0+2ωv0cos(ω(t−t2))+ωv0sin(ω(t−t2))=2ωv0[1+5cos(ω(t−t2)−φ)]
avec tanφ=2. Ce mouvement, d’amplitude plus faible que le mouvement initial, se poursuit jusqu’à ce que x˙=v0 où une nouvelle phase de collage s’amorce qui cesse à nouveau quand x=x2.
Un régime périodique prend naissance avec succession de phases de
collage et d’oscillation.
En rouge, les phases de “collage”.
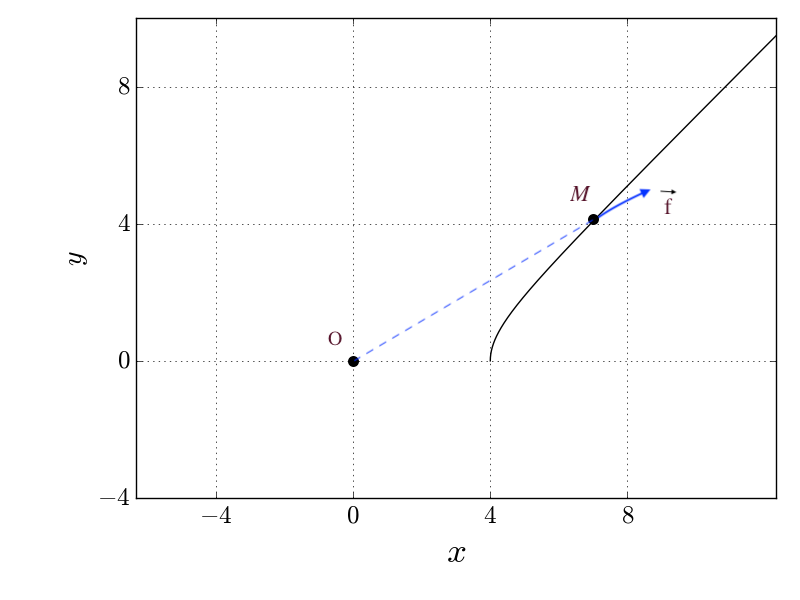
Exercice 158 ⭐️⭐️⭐️ Force répulsive en 1/r^3, X MP 2022, L2/Spé
Un point matériel M de masse m est soumis à une force centrale f=r3kmur,
avec ur=∥∥∥∥OM∥∥∥∥OM. La distance initiale au point O est r0. La vitesse initiale v0 est selon le vecteur uθ, perpendiculaire à ur. Déterminer la trajectoire de M.
Réflexes
Force centrale 👉 Le moment cinétique est constant, le mouvement est plan,…
La force dérive d’une énergie potentielle 👉 L’énergie mécanique est constante.
Indice
Utiliser la fonction u(θ)=r(θ)1
Corrigé
Supposons qu’il existe un référentiel galiléen de point fixe O et plaçons nous dans ce référentiel.
La force est centrale, donc
le moment cinétique LO par rapport à O est constant (dtdLO=OM∧F=0)
le mouvement est plan (M est dans le plan passant par O et perpendiculaire au vecteur constant LO=OM∧mv0). Le plan de la trajectoire est le plan (OM,v0).
En coordonnées polaires (r,θ) dans ce plan, LO=OM∧mv=mr2θ˙uz
(avec uz=ur∧uθ).
D’où θ˙=mr2LO=r2r0v0
La force dérive d’une énergie potentielle Ep telle que F=−gradEp, soit Ep=2r2km en choisissant une énergie potentielle nulle à l’infini.
L’énergie mécanique se conserve. Em=21mv2+3r2km=21mv02+2r02km. En coordonnées polaires, Em=21m(r˙2+r2θ˙2)+2r2km=21mr˙2+m2r2(r0v0)2+2r2km.
Em est constante, mais l’intégration de r(t) n’est pas évidente.
La question porte sur la trajectoire, il est judicieux de s’intéresser directement à la fonction r(θ) . r˙ s’exprime comme la dérivée d’une fonction composée r˙=dθdrθ˙=r2r0v0dθdr.
Em=21m(r0v0)2(r21dθdr)˙2+m2r2(r0v0)2+2r2km.
Avec u(θ)=r(θ)1, u′=−r21dθdr et Em=21m(r0v0)2(u′)2+m2[(r0v0)2+k]u2.
En dérivant par rapport à θ, u′((r0v0)2u"+[(r0v0)2+k]u)=0.
Pour u′=0, u"+α2u=0, en posant α=1+(r0v0)2k>1. D’où u=Acos(αθ)+Bsin(αθ).
Choisissons l’origine des angles telle que θ(t=0)=0. À t=0, {u=A=r01u′=−r21dθdr=r0v0r˙=0.
D’où u=r01cos(αθ) et finalement r=cos(αθ)r0, avec α=1+(r0v0)2k.
Exemple de trajectoire avec r0=4,0 en unité arbitraire et α=2,0.
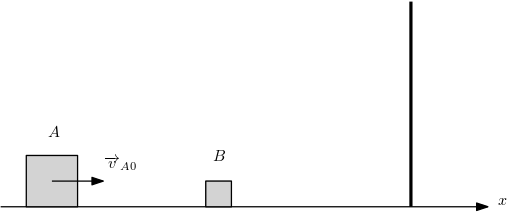
Exercice 168 ⭐️⭐️⭐️ Comptage de chocs, L2/Spé
Deux solides A (masse mA et vitesse vA) et B (masse mB≤mA et vitesse vB) peuvent se déplacer sans frottement sur un plan horizontal selon l’axe (Ox). À l’instant initial, B est au repos entre A et le mur, et A se déplace vers B à la vitesse vA0. Les chocs entre masses d’une part, entre une masse et le mur d’autre part, sont élastiques. Les mesures algébriques des vitesses sont vA et vB .
Il a été remarqué (voir https://www.youtube.com/watch?v=HEfHFsfGXjs) que lorsque que mA=102p×mB,p entier, le nombre de chocs permet de retrouver la suite des chiffres de π ! On se propose de vérifier cette observation.
Tout d’abord mA=mB. Que se passe-t-il ?
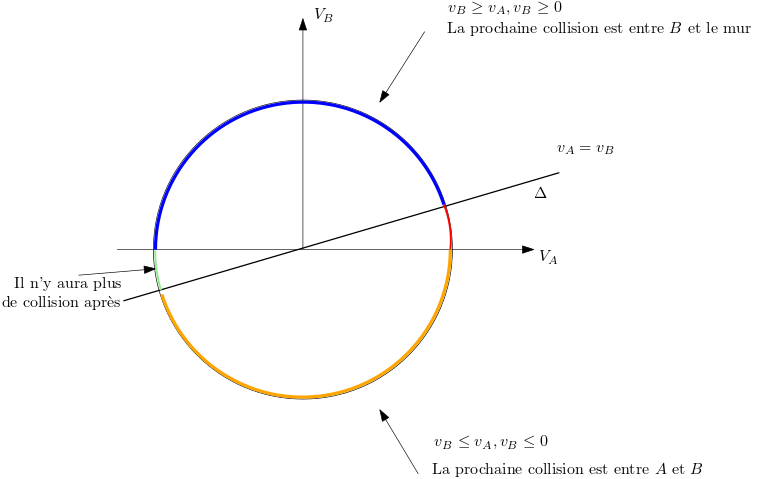
Dans toute la suite mA>mB. On pose VA=mAvA et VB=mBvB. Exprimer les grandeurs qui se conservent en fonction de VA et VB. Montrer que le point de coordonnées (VA,VB) se trouve à tout instant sur un cercle.
A quelle condition sur VA et VB un choc entre les deux solides ne se produira plus, sauf après éventuellement un choc entre B et le mur (qui modifierait VB)? Cette condition correspond à une région du cercle délimitée par une droite Δ. Donner un vecteur directeur de Δ.
En supposant la condition précédente remplie, à quelle condition y aura-t-il un choc entre B et le mur ? Représenter les différentes zones sur le cercle.
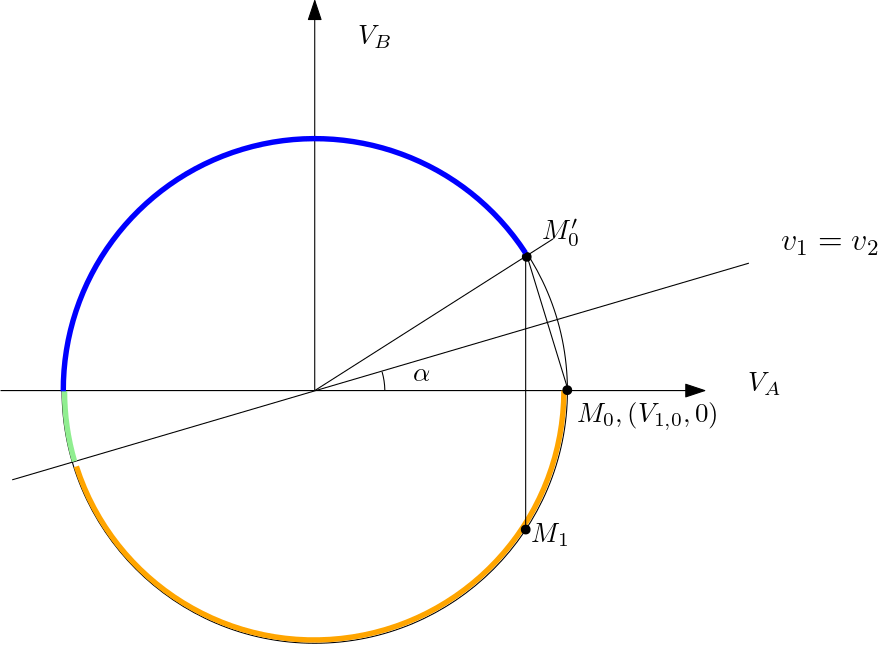
Dans le système de coordonnées (VA,VB), interpréter géométriquement la conservation de la quantité de mouvement lors d’un choc entre masses comme une symétrie par rapport à une droite à préciser. Interpréter de même géométriquement le choc entre B et le mur. En déduire comment se traduit géométriquement la succession des deux étapes choc entre masses et choc entre B et le mur.
Conclure.
Réflexes
Choc élastique 👉 Conservation de l’énergie cinétique.
Corrigé
En référentiel terrestre galiléen, en dehors des collisions A et B sont soumis chacun à son poids et à la réaction verticale du support. Entre deux collisions le mouvement de chacune selon (Ox) est donc rectiligne uniforme.
Une collision entre A et B est élastique : il y a conservation de l’énergie cinétique du système, et de la quantité de mouvement totale.
La collision entre B et le mur est élastique : le mur étant immobile, l’énergie cinétique de B se conserve et sa vitesse algébrique change de signe.
Quand mA=mB, lors du premier choc, la conservation de l’énergie cinétique et de la quantité de mouvement (exprimée ici en valeur algébrique sur (Ox) donne , en affectant un indice 1 après le choc) : {21mvA,02=21mvA,12+21mvB,12mvA,0=mvA,1+mvB,1⟺{vA,02−vA,12=vB,12vA,0−vA,1=vB,1
D’où si vB,1=0 {vA,0+vA,1=vB,1vA,0−vA,1=vB,1.
Soit vB,1=vA,0 et vA,1=0.
La solution vB,1=0 donne vA,1=vA,0 est impossible, car A devrait traverser B ! Donc A s’arrête et B entre en collision avec le mur, à la suite de quoi B repart dans le sens des x décroissants à la vitesse algébrique vB,1′=−vA,0.
Puis B rentre à nouveau en collision avec A. Après le choc, le problème étant le même que celui du premier choc, B a une vitesse nulle vB,2=0 et vA,2=vB,1′=−vA,0.
Il y a eu en tout 3 chocs.
Lors d’un choc entre masses, l’énergie cinétique 21mAvA2+21mBvB2=21VA2+21VB2 se conserve,
ainsi que la quantité de mouvement mAvA+mBvB=mAVA+mBVB.
Lors d’un choc entre B et le mur, l’énergie cinétique est aussi conservée, de telle sorte que VA2+VB2=VA,02=mAvA2.
Dans le système de coordonnées (VA,VB), le point représentant le système est donc sur le cercle de centre origine, de rayon VA,0.
Considérons le cas d’une collision entre A et B. Le point juste avant la collision vérifie nécessairement vB<vA (on peut distinguer les cas vA≥0 ou vA≤0 pour s’en convaincre).
C’est à dire mBVB<mAVA.
Le cercle est ainsi partagé en deux régions par la droite VB=mAmBVA de vecteur directeur (par exemple) a de coordonnées (mA,mB). Pour qu’il n’y ait pas collision, le point (VA,VB) doit se trouver au-dessus de la droite qui fait un angle arctanmAmB.
Une collision entre B et le mur se produira cependant pour VB>0 (zone en bleu sur le graphique).
On obtient donc 4 zones sur le cercle. Pour qu’il n’y ait plus de chocs, il faut donc que le point (VA,VB) se trouve dans la zone verte (vB≤0 et vB≥vA). Remarquons qu’il reste une zone (en rouge sur le cercle) non décrite, qui décrit le système avant le premier choc.
Lors du choc entre A et B, , mAVA+mBVB est constant. Cette expression est le produit scalaire dans le plan du graphique du 3. du vecteur de coordonnées (VA,VB) avec le vecteur a de coordonnées (mA,mB).
Soient Mk et Mk′ les points sur le graphe avant et après le (k+1)ieˋmechoc entre A et B, Mk′ est donc le symétrique de Mk par rapport à la droite Δ.
Lors du choc avec le mur, VB change de signe. Les points Mk′ et Mk+1 après le (k+1)ieˋmechoc entre B et le mur sont symétriques par rapport à l’axe des abscisses.
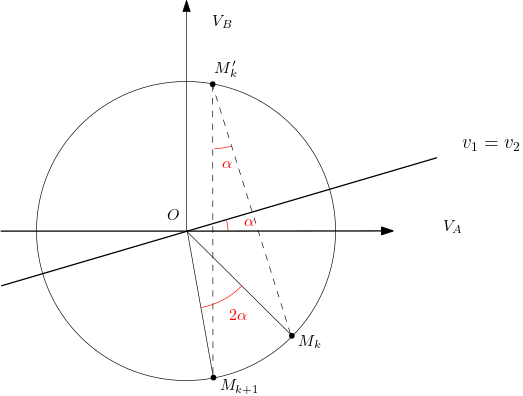
On passe de Mk à Mk+1 par deux symétries successives par rapport à deux droites faisant un angle α et se croisant en O. La composée de deux symétries axiales est une rotation de centre O d’angle 2α, ce dont on pourra se convaincre sur le schéma suivant si on a oublié ce théorème.
Soit Mk le point qui se déduit de M0 par une rotation d’angle 2kα. Deux cas peuvent se produire :
soit il existe k∗ tel que 2k∗α∈[π−α,π[
: on termine alors dans la zone verte. La dernière séquence est :
choc entre A et B puis choc sur le mur avec une vitesse de B inférieure en valeur absolue à la vitesse de A (négative). Dans ce cas le nombre total de chocs est égal à n∗=2k∗. On a : n∗=2k∗∈[απ−1,απ[
soit il existe k∗ tel que (k∗−1)2α<π−α<π≤k∗2α.
Le dernier choc est entre A et B avec deux vitesses négatives, la vitesse de B devenant inférieure en valeur absolue à celle de A. Dans ce cas le nombre de chocs est égal à n∗=2k∗−1.
On a :
n∗=2k∗−1∈[απ−1,απ[
Cas particulier : quand il existe k∗ tel que k∗×2α=π, le mouvement est parfaitement symétrique, et le nombre de collisions est égal à 2k∗−1.
Avec απ=arctanmAmBπ, n∗ est le seul entier dans l’intervalle ⎣⎢⎡arctanmAmBπ−1,arctanmAmBπ⎣⎢⎡.
On vérifie que pour mA=mB , n∗=3 ; pour mA=100mB, n∗=31 ; pour mA=106mB, n∗=3141, etc…
Quand x=mAmB→0 , arctanx=x−3x3+o(x4)=x(1−3x2+o(x3))
et donc n∗ est l’entier dans l’intervalle ⎣⎢⎡x(1−3x2+o(x3))π−1,x(1−3x2+o(x3))π⎦⎥⎤
Si x=10−p , on obtient l’intervalle [1−3x2+o(x3)10pπ−1,1−3x2+o(x3)10pπ].
1−3x2+o(x3)10pπ=10pπ(1+3x2+o(x3))=10pπ+u avec u≃3110−pπ.
On obtient ainsi pour n∗ les p premiers chiffres significatifs de π…
Merci à Romain Péchayre pour avoir signalé le sujet et à Dominique Henriet pour l’idée de la démonstration géométrique.
Exercice 169 ⭐️⭐️ Chute d’une bille sur une hélice, CCMP PC 2023, Sup/L1
Une bille, considérée comme un point matériel de masse m, est contrainte à se déplacer en glissant le long d’un support filiforme en forme d’ hélice circulaire. Cette hélice est donnée,en coordonnées cylindriques, par les équations (zaxe descendant) : {r=Rz=p2πθ
Dans le cas où il n’y a aucun frottement entre la bille et le support, déterminer z(t).
Dans le cas où existent un frottement solide entre la bille et le support (de coefficient de frottement dynamique f ), on cherche à déterminer expérimentalement ce coefficient f. Après un court régime transitoire (qui n’est pas à étudier), la vitesse de la bille est constante. Établir l’ expression de cette vitesse limite en fonction, entre autres, du coefficient f.
On pourra introduire la grandeur sans dimension λ=p2πR.
Réflexes
Mouvement avec glissement 👉 Lois de Coulomb : la reaction tangentielle est de sens contraire à la vitesse de glissement et les composantes tangentielle et normale de la réaction du support vérifient∥Rt∥=f∥Rn∥.
Corrigé
Dans le référentiel terrestre supposé galiléen, le système étudié
est la bille. Les forces appliquées sont le poids vertical, et la réaction normale au support.
La réaction ne travaille pas, il y a donc conservation de l’énergie mécanique.
Avec (Oz) axe vertical descendant, l’énergie potentielle est EP=−mgz+Cte.
L’énergie cinétique est EC=21mv2.
En coordonnées cylindriques,avec (r=R), v(M)=Rθ˙eθ+z˙eθ=z˙(p2πRer+eθ)
Soit EC=21mz˙2(1+λ2).
L’énergie mécanique Em=21mv2−mgz=21m(1+λ2)z˙2−mgz+Cte. Em est une constante du mouvement. En dérivant par rapport au
temps : z˙m((1+λ2)z¨−g)=0.
Lors du mouvement de la bille z˙=0 et z¨=α2g.
En supposant z=0 à t=0, et en supposant la vitesse nulle initialement,
par double intégration : z(t)=2(1+λ2)gt2=2(1+p24π2R2)gt2(homogène).
La bille descend moins vite qu’en chute libre, et d’autant moins vite
que R/p est grand, ce qui est cohérent.
Dans ce cas, la réaction R a une composante normale Rn et une composante tangentielle Rt à la trajectoire. Les lois de Coulomb indiquent qu’en cas de glissement ∥Rt∥=f∥Rn∥.
Quand la vitesse prend une valeur constante, v2=(1+λ2)z˙2⇒z˙
est constante (la vitesse verticale ne change pas de signe, la bille ne va pas se mettre à remonter l’hélice) et par conséquent θ˙ aussi.
En coordonnées cylindriques, avec Rr,Rθ,Rz les coordonnées
de R, la seconde loi de Newton donne : ⎩⎪⎪⎨⎪⎪⎧−mRθ˙2=RrmRθ¨=Rθmz¨=Rz+mg, soit ⎩⎪⎪⎪⎨⎪⎪⎪⎧Rr=−mR(p2πz˙)2=−m1+λ2λ2Rv2Rθ=0Rz=−mg.
Sur la trajectoire hélicoïdale, le déplacement élémentaire est dℓ=Rdθeθ+dzez=dz(λeθ+ez)=dz1+λ2t,
où t est le vecteur unitaire tangent à la trajectoire.
Donc t=1+λ2λeθ+1+λ21ez.
On en déduit la composante tangentielle (de sens contraire à la vitesse) Rt=(R.t)t=Rz.1+λ21t=−1+λ2mgt,
et la composante normale Rn=R−Rt=Rrer−mgez+1+λ2mgt=Rrer−mgez+1+λ2mg(λeθ+ez)=−m1+λ2λ2Rv2er+mg1+λ2λeθ−mg1+λ2λ2ez. ∥∥∥∥Rn∥∥∥∥=mg(1+λ2λ2)2R2g2v4+(1+λ2λ)2+(1+λ2λ2)2=mg1+λ2λR2g2λ2v4+1+λ2.
Avec ∥∥∥∥Rt∥∥∥∥=1+λ2mg, la condition ∥Rt∥=f∥Rn∥ donne 1+λ21=f2(1+λ2λ)2(1+λ2(1+R2g2v4)), soit